机构名称:
¥ 1.0
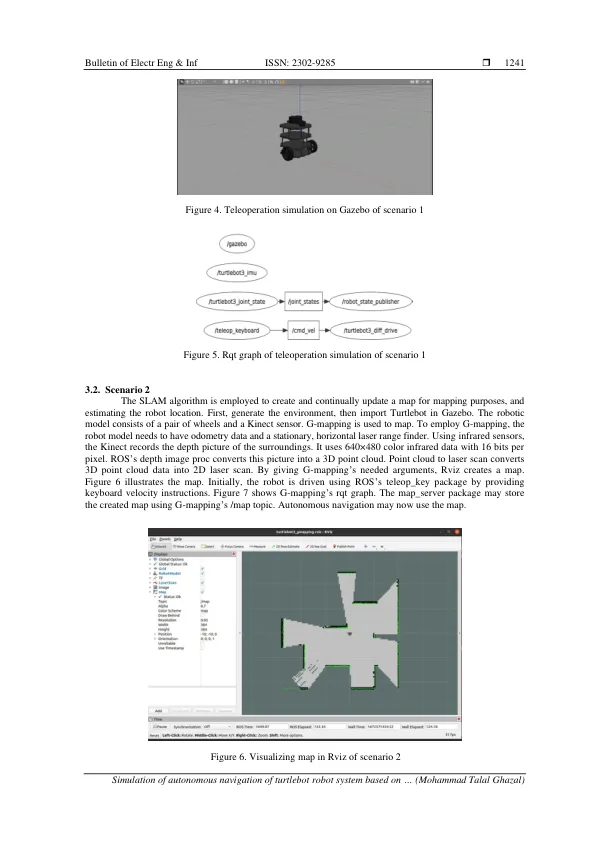
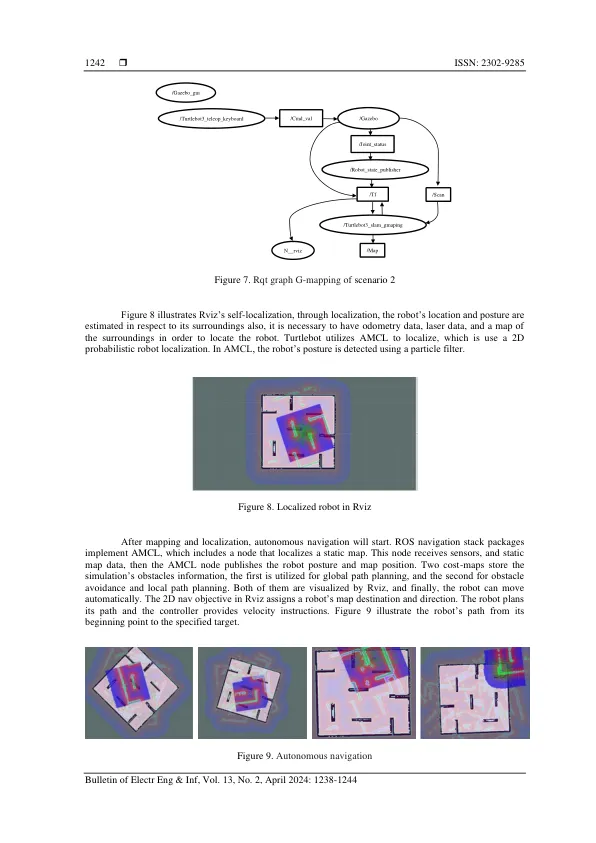
复杂的系统科学最近将重点转移到包括建模,模拟和行为控制。在机器人操作系统(ROS)上构建的有效仿真软件用于机器人开发,以促进模拟环境与控制行为的硬件测试之间的平稳过渡。在本文中,我们演示了如何使用同时定位和映射(SLAM)算法来允许机器人自动导航。凉亭用于模拟机器人,RVIZ用于可视化模拟数据。G映射软件包用于使用来自各种传感器(包括激光和探光度)收集的数据来创建地图。为了测试和实施自主导航,在凉亭生成的模拟环境中使用了海龟机器人。我们认为,使用这些重要工具对ROS进行的其他研究可能会导致对执行机器人技术测试的更多采用,进一步的评估自动化和有效的机器人系统。
仿真Turtlebot机器人系统的自主导航
主要关键词



相关文件推荐