机构名称:
¥ 1.0
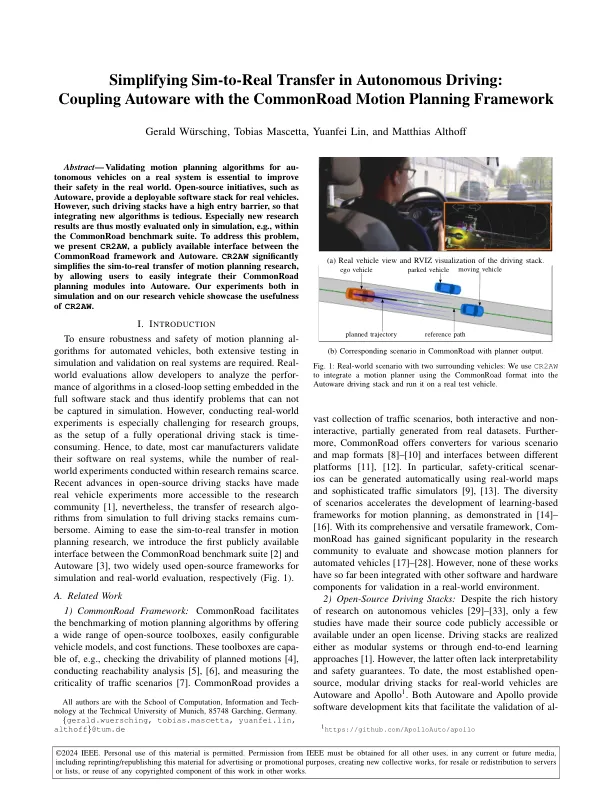
摘要 - 在实际系统上验证Au au ausost everals的运动计划算法对于提高其在现实世界中的安全至关重要。开源计划,例如Autoware,为真实车辆提供了可部署的软件堆栈。但是,这种驾驶堆栈具有很高的进入障碍,因此集成新算法是乏味的。尤其是新的研究结果,主要仅在模拟中,例如在CommonRoad Benchmark Suite中进行评估。为了解决这个问题,我们提出了CR2AW,这是CommonRoad框架和自动保健之间的公开接口。CR2AW可以通过允许用户轻松将其CommonRoad计划模块整合到AutoWare中,从而大大简化了运动计划研究的SIM转移。我们在模拟和研究工具上进行的实验展示了CR2AW的实用性。
commonRoad-carla接口:桥接运动计划和3D模拟之间的差距
主要关键词
相关文件推荐