机构名称:
¥ 1.0
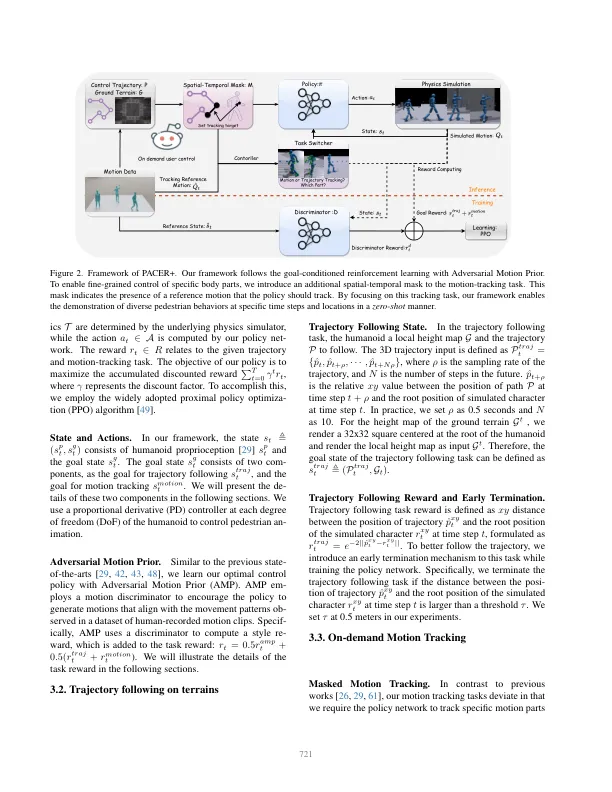
我们应对行人模拟中的内容多样性和收获性的挑战,以驱动方案。最近的行人动画框架具有重要的限制,其中他们主要关注轨迹[48]或参考视频[60]的内容,因此忽略了这种情况下人类运动的潜在多样性。这种限制限制了产生行人行为的能力,这些行为表现出更大的变化和现实动作,因此重新严格使用其用法,为驾驶模拟系统中的其他组件提供丰富的运动内容,例如,突然改变了自动驾驶汽车应响应的运动。在我们的方法中,我们努力通过展示从各种来源获得的各种人类动作(例如生成的人类运动)来超越限制,以遵循给定的轨迹。我们的框架的基本贡献在于将运动跟踪任务与轨迹结合到以下,这可以跟踪特定运动零件(例如上半身),同时遵循单个策略的给定轨迹。以这种方式,我们在给定情况下显着增强了模拟人类运动的分歧,以及内容的可控性,包括基于语言的控制。我们的框架有助于生成
起搏器+:在驾驶场景中的按需行人动画控制器
主要关键词




相关文件推荐