机构名称:
¥ 1.0
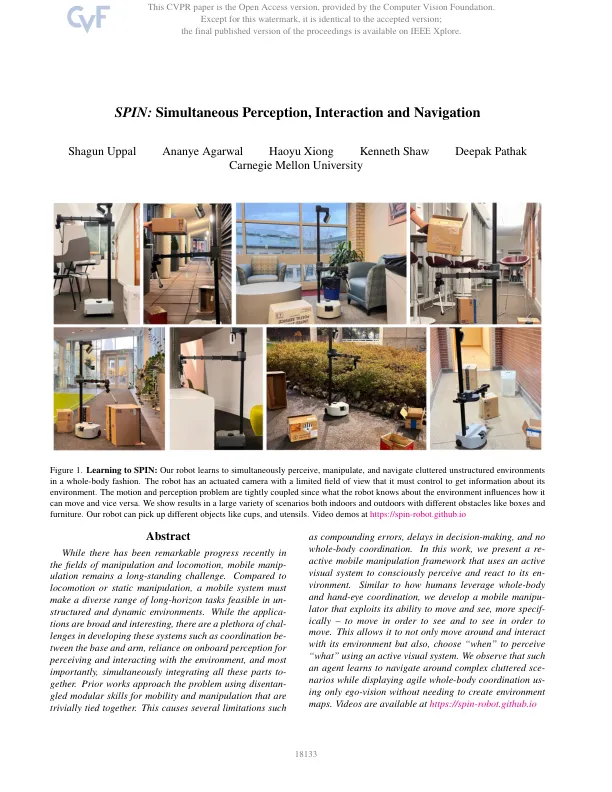
最近在操纵和运动领域取得了显着进展,但移动操作仍然是一个长期以来的挑战。与运动或静态操纵相比,移动系统必须在非结构化和动态环境中可行的多种长距离任务。尽管应用程序广泛且有趣,但在开发这些系统(例如基础和手臂之间的协调)时,有很多挑战,依靠在船上感知到感知和与环境互动,最重要的是,同时整合了所有这些部分。先前的作品使用模块化技能来解决问题,以使其动机和操纵被微不足道地捆绑在一起。这引起了多个限制
旋转:同时感知交互和导航
主要关键词



相关文件推荐