机构名称:
¥ 3.0
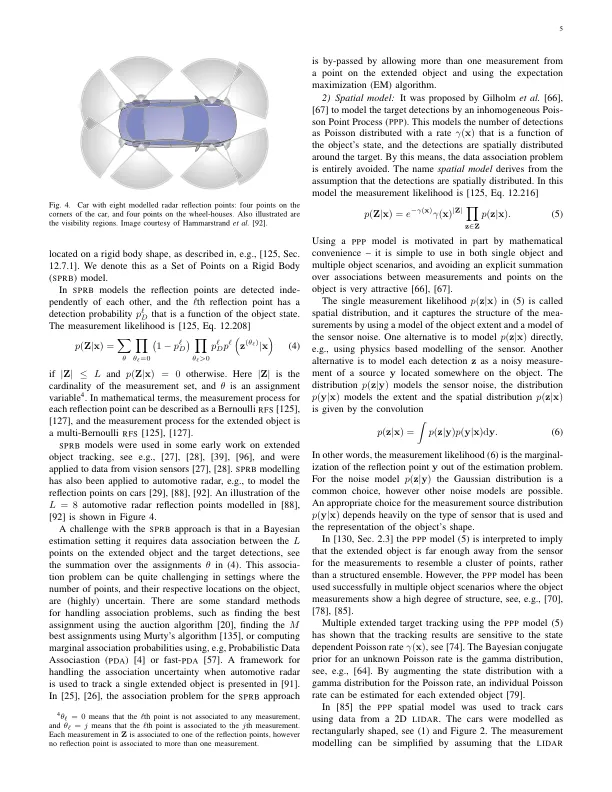
摘要 — 本文对扩展对象跟踪的当前研究进行了详尽概述。我们对扩展对象跟踪问题进行了清晰的定义,并讨论了其与其他类型对象跟踪的界限。接下来,我们将广泛讨论扩展对象建模的不同方面。随后,我们将介绍两种基本且常用的扩展对象跟踪方法——随机矩阵方法和基于卡尔曼滤波器的星形凸形状方法。下一部分将讨论多个扩展对象的跟踪,并详细说明如何使用随机有限集 (RFS) 和非 RFS 多对象跟踪器解决大量可行的关联假设。本文最后总结了当前的应用,其中重点介绍了四个示例应用,涉及摄像头、X 波段雷达、光检测和测距 (LIDAR)、红绿蓝深度 (RGB-D) 传感器。
扩展对象跟踪:简介、概述和... - arXiv
主要关键词




相关文件推荐






















![单元 – 1 [软件工程简介] 1.软件...](/simg/1/177538934b1c3cc709f1226bf26ac8a7bf20c8a9.webp)