XiaoMi-AI文件搜索系统
World File Search System上下文
iaeg-SDGS(可持续发展目标和生物多样性政策上下文)
欧盟森林战略年:2022实体:欧盟(绿色交易核心行动补充生物多样性战略)摘要:该战略有助于实现欧盟的生物多样性目标和减少GHG目标到2030年至少55%,到2050年到2050年气候中立。它认识到森林的核心和多功能作用以及森林人的贡献以及整个基于森林的价值链,到2050年到2050年实现可持续和气候中性的经济,并保留了活泼和繁荣的农村地区。
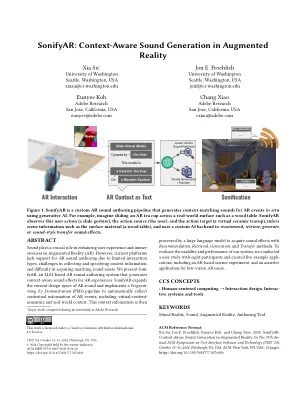
Sonifyar:增强现实中的上下文感知声音
(1)有限的现实世界上下文。现有系统通常支持链接到AR中虚拟对象的动作触发器,但缺乏对现实世界上下文信息的支持(例如,,一种虚拟玩具机器人,穿越木材,地毯或玻璃等多样化的室内表面。(2)有限的交互规范。现有系统仅提供预定义的交互触发器,例如“ TAP”和“接口输入”。这限制了创建者在提供的选项之外指定交互的能力,尤其是涉及环境环境的选项(例如,用户在现实世界中“幻灯片”虚拟粉笔在现实世界黑板上滑动)。(3)有限的声音来源。现有系统受其图书馆中可用的声音资产的限制以及在线合适的声音资源的稀缺性。因此,AR的作者努力为不同的AR事件找到适当的声音(例如,复制虚拟蜻蜓的翅膀颤动或模拟虚拟恐龙的饮食声音)。

分子和细胞上下文影响SCN8A变异函数
引入编码电压门控钠(Na V)通道的基因中的致病变异在患有早发作,发育和癫痫性脑病(DEE)的个体中经常发现,以及相关的神经发育障碍(NDDS)(NDDS)(1,2)。确定Na V通道变体的功能后果可以提供有关病理生理机制的信息,并可能指导精确的治疗方法(3,4)。使用正确的分子环境(例如,物种起源,剪接同工型)来研究离子通道变体的功能,对于准确的评估至关重要。编码Na V 1.6的SCN8A中的致病变异已成为神经衰变疾病的重要原因,在婴儿期间典型发作(5)。最早发现的DEE与具有功能获得性能的非截断变体(例如增强的持续电流,激活的电压依赖性改变)。随后,在患有临床严重程度较大的表情的个体中发现了SCN8A变体,而没有癫痫发作(6)。在成熟的神经元中,Na V 1.6位于轴突初始段,该通道用于发起动作电位(7)。基因在早期发育过程中经历了特定的替代剪接事件,包括框架内包含2个不同版本的外显子5中的1个,该版本编码了第一个电压 - 感应域的一部分(8)。重要的是,国家生物技术信息中心(NCBI)指定为变体1(NM_014191)的SCN8A参考编码顺序(NM_014191)包括外显子5N,而包括外显子5A的序列为外显子5N在胚胎发育期间和出生后立即占主导地位,但大约1岁的转录本包含替代外显子5A超过含有5N的外显子,并且5A同工型在春季春季占主导地位(9)。
covid-19疫苗证书:安大略省上下文的关键注意事项
正如联邦政府已经发出了信号的那样,加拿大共同的19疫苗护照将在全国范围内开发和实施,并将与Covid-19-19疫苗证书不同,这将是个人省份和领土的责任,作为负责疫苗接种居民的实体。4存在与加拿大省和地区疫苗文档的收集,存储和共享有关的技术挑战。5个疫苗证书计划正在考虑加拿大省和领土,包括不列颠哥伦比亚省,新不伦瑞克省,西北地区和新斯科舍省。5在2021年7月8日,魁北克宣布,可能需要进行数字疫苗接种才能进入COVID-19传输的中等或高风险设置。设置,例如健身房,团队运动和剧院,可能需要在案件上升的情况下进行疫苗接种的证明

量子理论中的边界和模拟上下文相关性
我们介绍了在广义上下文情景中的一组量子相关集的半限定性放松的层次结构。这构成了一个简单且通用的工具,用于界定量子上下文的大小。为了说明其效用,我们使用它来确定对以前最大违规行为的最大量子违规违规。然后,我们走得更远,并使用它来证明无法用纯净的状态来解释某些制备上下文的相关性,从而表明混合状态是上下文中必不可少的资源。在本文的第二部分中,我们将注意力转移到了一般操作理论中制备上下文相关性的模拟中。我们介绍了模拟制备上下文性的信息成本,该信息成本量化了在古典模型或量子模型中模拟上下文相关性所需的附加(否则禁止)的信息。在这两种情况下,我们都表明,使用我们半限制放松的层次结构的变体可以将模拟成本限制在有效的界限上,并且我们以奇怪的多样化的最简单上下文性场景进行了精确计算。
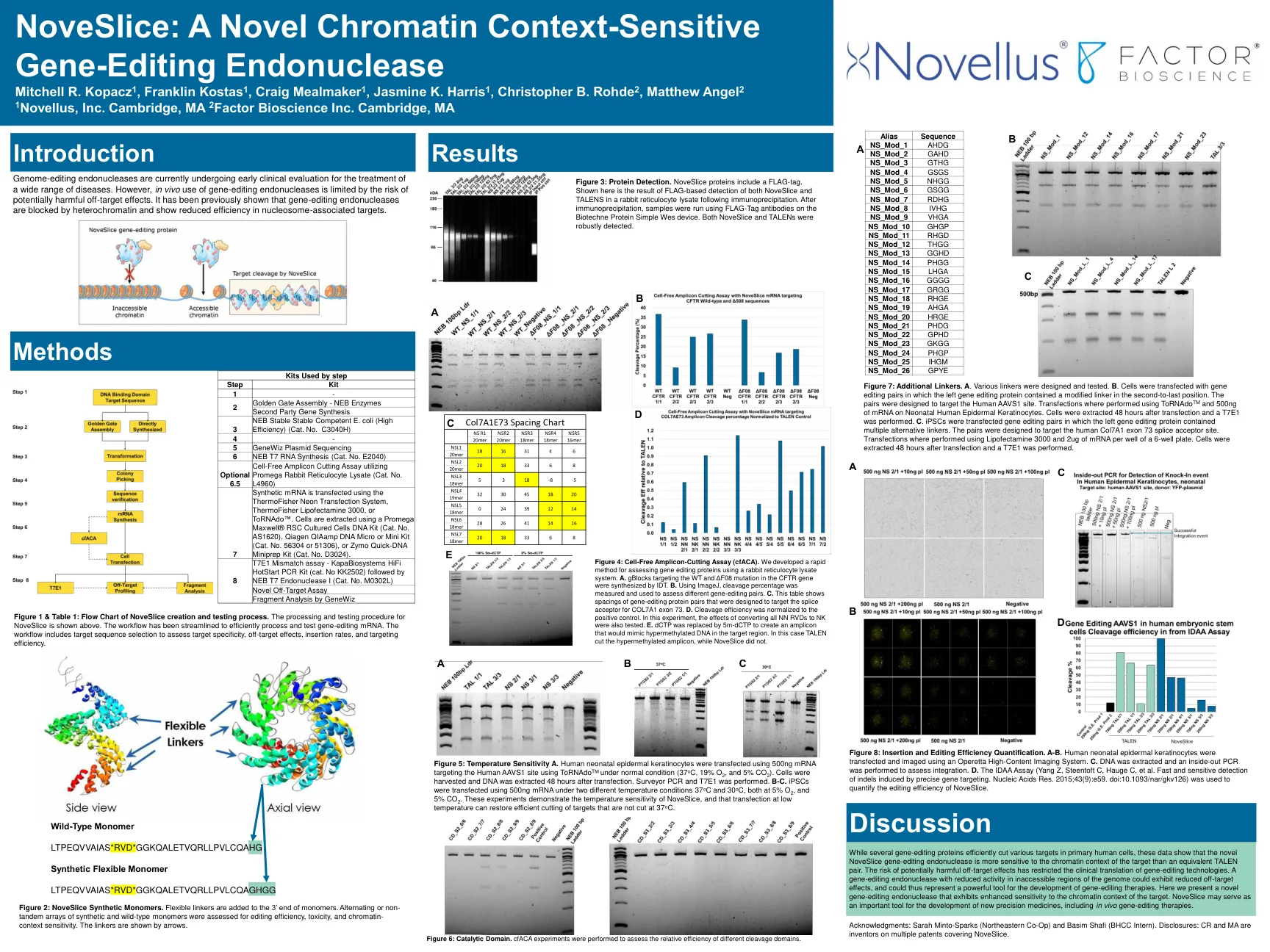
NoveSlice:一种新型染色质上下文敏感基因......
虽然几种基因编辑蛋白可以有效地切割原代人类细胞中的各种靶标,但这些数据表明,新型 NoveSlice 基因编辑内切酶对靶标染色质环境的敏感性比等效 TALEN 对更高。潜在有害的脱靶效应风险限制了基因编辑技术的临床转化。在基因组不可接近区域中活性降低的基因编辑内切酶可以表现出更少的脱靶效应,因此可以成为开发基因编辑疗法的有力工具。我们在此介绍了一种新型基因编辑内切酶,它对靶标染色质环境表现出更高的敏感性。NoveSlice 可以作为开发新型精准药物(包括体内基因编辑疗法)的重要工具。

上下文感知的预测运动计划安全自主驾驶
在自动驾驶汽车中,在不确定环境中的几个道路使用者中,在交通状况中是安全有效的操作。前瞻性运动计划策略试图预测周围的交通变动,然后使用这些预测来计划无碰撞的道路。在交通环境中,有多个汽车的中央研究问题是如何处理汽车,驾驶行为不确定性和周围环境的影响之间的相互作用,以实现安全的运动计划。本文提出了在不确定和动态环境中自动驾驶汽车的运动计划方法,并有助于设计达到期望绩效的策略。第一个贡献包括一种相互作用的策略预测模型预测调节(MPC)。该方法基于相互作用的模型的整合,以预测周围汽车的运动和自己的汽车的时间变化参考目标。结果是在动态的交通环境中进行的主动运动计划,其中几辆汽车不仅允许当地重新计划道路。第二个贡献扩展了MPC方法,也能够处理环境中的多模式操作不确定性,其中包括驾驶操作和特定方式的不确定。该方法包括对这些不确定性进行建模以及引入一个参数,该参数能够在运动计划者的性能和稳健性之间保持平衡。第三个贡献集中在自动学习上,同时驱动周围汽车的运动不确定性,以避免操作员过于谨慎,而不会损害安全性。该方法是基于学习周围汽车的驾驶行为的基础,并采用后续策略来预测他们在不久的将来可以占据的道路的哪一部分。第四个贡献是一个注重环境意识的运动计划策略师,可以预测有关道路属性的周围汽车中可能驾驶操作。通过整合这些因素,该方法可以有效地预测周围汽车的运动,然后将其用于制定业务计划问题中的碰撞折叠标准。通过在各种交通情况下进行的模拟和实验,自动驾驶汽车可以通过整合对互动的意识,周围的汽车的不确定性以及周围环境的特征来实现安全有效的运动计划。

基于视频的情感并影响上下文数据集中的跟踪
人类情感识别一直是心理物理学和计算机视觉的重要主题。但是,经常发布的数据集有许多局限性。进行检查,大多数数据集都包含仅包含有关面部表情的信息的框架。由于以前的数据集的局限性,很难理解影响人类识别的机制,或者在这些数据集中训练的计算机视觉模型上对人类的识别良好。在这项工作中,我们介绍了一个全新的大型数据集,基于视频的情感并影响上下文数据集(VEATIC)中的跟踪,可以征服先前数据集的限制。Veatic在好莱坞电影,纪录片和家庭视频中有124个视频片段,并通过实时注释进行了连续的价和唤醒评级。与数据集一起,我们采用了一项新的计算机视觉任务,以通过每个视频框架中的上下文和字符信息来推断所选字符的影响。此外,我们提出了一个简单的模型来基准这项新的计算机视觉任务。我们还使用数据集与其他类似数据集进行了预处理模型的性能。实验显示了通过VEATIC验证的模型的竞争结果,表明VEATIC的普遍性。我们的数据集可从https://veatic.github.io获得。

通过视觉上下文压缩有效的大型多模式模型
尽管在大型语言模型(LLMS)的文本嵌入的压缩表示中已取得了重大进步,但多模式LLMS(MLLMS)中视觉令牌的压缩仍然很大程度上被忽略了。在这项工作中,我们介绍了有关在这些模型中有关视觉令牌和有效培训的冗余分析的研究。我们的初始实验表明,在测试阶段消除多达70%的视觉令牌,仅通过平均池,仅导致在视觉问题上降低3%的降低3%,从而回答GQA基准上的准确性,这表明在视觉上下文中有显着的冗余。解决此问题,我们介绍了视觉上下文压缩机,这减少了视觉令牌的数量,以提高训练和推理效率而不牺牲性能。为了最大程度地减少视觉令牌压缩而导致的信息损失,同时保持训练效率,我们将Llavolta作为轻巧和分期的训练方案开发,该方案结合了阶段的视觉上下文压缩,以逐步压缩视觉令牌从严重压缩到在训练过程中的轻度压缩,在测试时不会损失信息损失。广泛的实验表明,我们的方法在图像语言和视频语言理解中都提高了MLLM的性能,同时也大大降低了培训成本并提高了推理效率。

在伪装实例分段中揭示隐藏上下文
摘要。预测隐藏在com-plex上下文中的对象的实例级掩码是伪装实例分割(CIS)的目标,这一任务因伪装的obs obsptss and Anckatiks之间的惊人相似之处而复杂。伪装观察的各种外观,包括不同的角度,部分可见性和模棱两可的信息,进一步加剧了这一挑战。先前的作品考虑在高不确定性区域内clasifulsiful sifialpixels,而无需考虑其文本语义,从而导致许多假阳性。我们提出了一种称为Mask2Camouflage的新颖方法,该方法同时增强了上下文特征的建模,并完善了实例级别的预测地图。mask2Camouflage利用多尺度功能集成了骨干线中提取的功能。然后,引入了全局细化的交叉注意模块(GCA),以补充前景面罩和背景掩盖,以减少假阳性。fur-hoverore,通过模拟全球换档聚类过程,我们介绍了全球偏移的多头自我注意力(GSA),该过程使对象查询不仅可以从早期功能中捕获信息,还可以从结构性概念中捕获信息,从而降低与评估的数据验证的掩体对象检测任务中的类内部问题。与15种最先进的方法相比,我们的Mask2Camouflage显着提高了伪装实例细分的性能。我们的代码可在https://github.com/underlmao/mask2camouflage上找到。