XiaoMi-AI文件搜索系统
World File Search System控制飞机

迈向自动化新范式
担任监控人员时,在检测系统错误和在发生自动化故障时手动执行任务方面存在问题 (Billings, 1988; Wickens, 1992; Wiener and Curry, 1980)。此外,他们还需要监控更复杂的系统。在对自动化问题进行回顾时,Billings (1988) 指出,六起重大飞机事故可直接归因于未能监控自动化系统或自动化系统控制的参数。除了延迟检测到需要干预的问题之外,操作员可能需要相当长的时间才能充分了解系统状态,以便能够采取适当行动。这种延迟可能会阻止操作员执行他们在那里要执行的任务或降低所采取行动的有效性。1989 年,美国航空的一架飞机在拉瓜迪亚机场起飞时坠毁,由于自动油门意外解除而坠入河中,两名乘客丧生 (National Transportation Safety Board, 1990)。机组人员在没有了解问题的情况下试图控制飞机,花费了大量时间,导致中止起飞的决定被推迟,直到为时已晚。

KFC 500 - 本迪克斯/金
KFC 500 自动飞行控制系统在一台计算机中整合了完整的自动驾驶仪和飞行指引仪计算功能。其数字飞行计算机和集成架构使 KFC 500 能够更快地确定直升机的控制要求,并且比以前的自动驾驶仪系统更平稳、更准确地执行控制要求。主要由于其双通道飞行计算机设计,KFC 500 可以更积极地控制飞机,同时提供单通道系统无法提供的安全监控水平。整个飞行控制系统采用数字化固态设计,在节省系统重量和所需安装空间的同时,提供了最大的可靠性。KFC 500 旨在优化乘客和机组人员的舒适度,同时在任何飞行情况下仍能提供准确的控制响应。只要可能,自动驾驶仪引起的飞机运动就会接近人类可感知的下限,从而确保异常平稳的飞行。在飞机认证过程中,贝尔 230 型飞行控制系统的许多最大可控值均已确定。KFC 500 与 KAD 480 中央空中数据系统和 EFS 40/50 电子飞行仪表系统集成,以提高用户友好性和系统通告能力。

开发太阳能多电动微型航空车辆
旋转翼航空车提供机动性和垂直起飞和降落(VTOL)优势,优于固定翼系统。旋转翼系统确实具有相对较高的能量需求,因此飞行时间较短,因此对固定翼对应物的能量依赖性更大。光伏技术的进步已导致太阳能电池的特定功率(功率到重量比率)显着增加,从而实现了太阳能旋转旋转飞机的设计,现在是微型变体的。呈现的微型航空车辆(MAV)是微型太阳能电机,是0.15 m×0.15 m×0.02 m的0.02 m太阳能可调的无线电控制飞机。0.071千克飞机可以平均飞行3.5分钟,在25°C的1000 W/m 2辐照度下大约68分钟内充电,并且可以在没有阳光的情况下冬眠38天。本文通过使它们能够在不返回基地进行充电的情况下,探讨了增加市售光伏细胞的使用,以增加多转子MAV的能量自主权。已经提出了一个工作原型,其中包含了电池管理系统,自动电源开关,低功率睡眠模式以及第一人称视图(FPV)摄像头。
传感器 - 海军海上系统司令部
要与敌人交战,首先必须能够探测到敌人。因此,如果我们的海军战士不知道要与谁或什么交战,或者不知道向何处开火,世界上所有的火力都无济于事。这就是雷达和其他传感器如此至关重要的原因。此外,这些技术含量高的系统的作用远不止探测和与敌人交战。它们还用于控制飞机和导弹、海上导航、感知异常和跟踪天气等。没有这些至关重要的系统,船长的眼睛和耳朵在海上就会失去作用。我非常高兴地推出由 NAVSEA 作战中心赞助的本期《前沿》杂志。本期的主题是“传感器——21 世纪的挑战和解决方案”。事实上,我们的海军在未来几年面临着许多挑战。敌人的技术进步需要新的对策。需要设计、开发和部署能够与联合和联盟系统互操作的新型、更强大的系统,同时需要更换旧系统。沿海和河流战争需要更小、更轻的传感器,用于海军的小型平台。NAVSEA 作战中心欢迎这些挑战,因为我们从事提供解决方案的业务。我们研究、开发、测试和评估尖端技术和系统,为海军配备海上、海底、空中的传感器

受邀演讲摘要 - AAAI
当今的商用飞机使用“交通警报和防撞系统”(TCAS),该系统指示飞行员如何控制飞机;该系统的验证并未系统地研究空中交通管制员的活动如何影响飞机的运行。其中一个结果是 2002 年在德国于伯林根上空发生的一次碰撞,现在人们普遍认为这说明了人与自动化之间如何产生权力冲突。Brahms-GÜM 是一个多智能体模拟航空运输中的工作实践;它模拟了在安全关键、时间紧迫的情况下,分散的飞行员和空中交通管制员群体如何与 TCAS 和其他自动化系统交互。Brahms-GÜM 是通用的,可以对备选工作系统配置(包括于伯林根场景)进行假设分析,从而促进不同运营概念的设计。 Brahms-GÜM 展示了当工作系统的某些方面缺失或出现故障时,交互可能会变得不可预测,从而使日常复杂系统变成一个认知复杂且因此不受人类控制的系统。该项目还提供了一个试验台,用于应用模型检查方法来验证和确认工作系统设计。
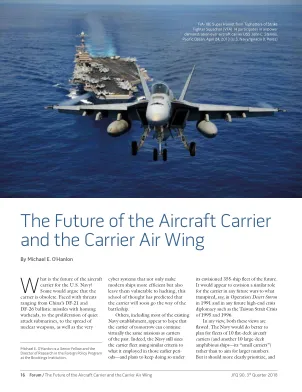
航空母舰和舰载机联队的未来
现代美国航空母舰和舰载机联队 美国目前拥有两支航空母舰舰队。大多数人一听到“航空母舰”这个词就会想到第一种,即大型平甲板航母,美国海军目前拥有 11 艘此类航母。每艘航母最多可容纳约 75 架飞机,合称为航母舰载机联队,具备弹射起飞和尾钩降落能力。1 目前,美国海军拥有 9 个航母舰载机联队,数量少于航母本身,因为飞机不需要像舰船那样进行漫长的维护和训练周期。2 这些飞机通常包括 44 架 F/A-18 大黄蜂或超级大黄蜂战斗机、5 架电子战飞机、4 架机载控制飞机、8 架反潜战飞机、2 架运输机和 8 至 11 架直升机,用于从反潜战到搜索和救援的各种目的。(换句话说,通常有四个 F/A-18 战斗机中队。通常还有一个直升机中队、一个电子战飞机中队、一个机载指挥和控制飞机中队和一个反潜战飞机中队。3 )随着时间的推移,航母舰队将包括 F-35C、鱼鹰倾转旋翼机,最终可能还会包括未来衍生的无人舰载空中监视和打击 (UCLASS) 飞机。它们将取代一些较旧的“大黄蜂”战斗机、C-2 飞机,或许还有其他系统。4
太空飞机 - 空军杂志
F,正如空军规划人员合乎逻辑地主张的那样,大气层和太空是一个称为航空航天的单一操作连续体,操作要求对技术的不可阻挡的压力最终必须将飞机与太空飞行器结合起来。结合的目的是设计一个有翼的后代,它可以飞入轨道,而不是用大型火箭助推器发射到轨道上,并且可以从传统机场起飞和降落。这种飞行器首次成功进入轨道并返回,将真正标志着人类征服太空的里程碑。“太空飞机”概念有一套令人敬畏的一般要求。它被设想为一种独立的单级飞行器,使用吸气式发动机在大气层中机动,并将自身加速到大约 18,000 英里/小时的卫星速度。它必须携带足够的燃料进入轨道以在太空中进行广泛机动,或者能够在高层大气中绕轨道运行时收集这些燃料。最后,太空飞机必须能够承受再入大气层的高温,在返回地球表面时在大气层中以极高的速度机动,并在任何所需的机场以相对较低的速度在动力下着陆。从军事上讲,太空飞机的吸引力是毋庸置疑的。然而,从技术角度来看,乍一看,它违反了控制飞机、吸气式发动机、助推火箭和再入飞行器设计的许多物理定律。它可以

空中交通管制员 (ATC) 单位的脑力负荷分析...
摘要 空中交通管制员 (ATC) 是塔台上的空中交通管制员,负责控制飞机从起飞到着陆的整个过程。ATC是一个脑力劳动负荷较高的职业。这项研究旨在确定印度尼西亚航空巨港分公司空中交通管制员 (ATC) 部门的脑力负荷水平。此类研究是描述性定性研究。研究数据收集是使用 NASA 任务负荷指数、访谈和观察进行的。样本是通过有目的的技术对总共六名知情人进行确定的。研究表明,机场控制塔 (ADC) 单位在时间需求维度 (439.4) 中占主导地位,因为它受到 11 个关键条件的影响。进近控制服务 (APP) 单位在努力维度 (412.2) 中最高,它受到保持最小间隔任务的影响,而区域控制中心 (ACC) 单位在总体绩效维度 (372.2) 中占主导地位,因为所需的成功程度是完美的。机场管制塔台 (ADC) 单位的平均 ATC 脑力负荷为 89,进近管制服务 (APP) 单位为 81,区域管制中心 (ACC) 为 86,均属重脑力负荷因此需要对工作组织实施定期调查和评估。关键词:工作量测量、脑力负荷、NASA TLX、空中交通管制员 参考书目:34 (1988-2016)

飞行路径控制系统的设计和仿真...
摘要:了解自动飞行控制系统的知识可以理解控制飞机飞行的基本问题,并提高其评估通常提出的问题解决方案的能力。有许多飞行任务需要让飞机非常精确地遵循某些特别定义的路径。每当要控制传统飞机时,飞行员都可以控制三个轴中的任意一个或所有轴的旋转速度:俯仰、滚转和偏航。在考虑飞行控制处理中的控制时,需要在飞机上测量航向和压力高度等路径变量。这些近似是线性的,也是充分的;这类系统可以被视为飞行路径控制系统类的成员,并在本文中进行了深入讨论。本文以时域方法为基础,介绍了现代控制理论方法,特别是状态方程的使用,这是一种自然有效的技术,与飞机动力学的数学描述相协调,最完整、最方便地用状态和输出方程来表达。本文还涉及 AFCS 的特定模式,涉及在不同飞行条件下为参考飞机 CHARLIE(一种非常大的四引擎喷气式客机)实施的飞行路径控制系统。SIMULINK 用于实现飞行路径控制系统,因为它们对于形成集成 AFCS 的最外层循环非常重要。关键词:飞机动力学、自动飞行控制系统 (AFCS)、飞行路径控制系统 (FPCS)

基于视觉的无人机自主着陆学习方法...
根据 ONERA [1] 和 EASA [21] 的路线图,实施机器学习 (ML) 技术以提高飞行器的自主性和可靠性是一个非常活跃的研究领域。视觉传感器和计算性能的最新进展以及 ML 技术和算法的改进使基于计算机视觉的解决方案成为改进制导、导航和控制架构的真正资产,例如通过丰富数据融合算法,从而提高无人机的导航性能 [24]。此外,这些解决方案是被动的、廉价的,除了机载摄像头和视觉处理单元外,不需要任何特殊设备。近年来,ONERA 和 ISAE-SUPAERO 为基于计算机视觉的民用飞机自主性和安全性的最新进展做出了重大贡献。尽管获得了宝贵的成果和多次成功的飞行演示,但大多数开发的方法都是基于经典技术,数据驱动算法的使用非常有限,并且考虑的场景仅限于正常能见度条件。因此,其他机器学习方法和架构仍有很大的改进和探索空间,特别是在民用飞机着陆阶段,在正常和下降的能见度条件下。事实上,着陆阶段被认为是迄今为止最关键的阶段,它可以从计算机视觉工具中受益,这些工具可以为飞行员提供信息,甚至可以部分或完全控制飞机。基于视觉的着陆是 EASA CoDANN(神经网络设计保证概念)报告 [6] 中详述的第一个具体示例,需要在传感器生成的图像上识别着陆跑道。