XiaoMi-AI文件搜索系统
World File Search System效应器

使用扩展的块项张量回归根据颅内脑活动预测手指运动和共同激活
每年,全球有多达 50 万患者因脊髓损伤、脑干中风和肌萎缩侧索硬化症 (ALS) 而陷入瘫痪 [1]。脑机接口 (BCI) 能够绕过断开的神经通路来取代丢失或受损的身体部位的功能,这使得它们被推广为这些患者的解决方案。通常,BCI 系统由几个组件组成:从记录的大脑活动中提取信号特征,并将结果翻译(“解码”)为控制外部设备(如机械臂或手)的命令。BCI 控制手部肌肉的功能性电刺激 (FES) [2, 3] 和假手、外骨骼或其他效应器 [4, 5, 6, 7] 已经取得了非凡的成果。
高温增加了通过VI型分泌系统
海上温度和热浪的上升对全世界的珊瑚礁构成了重大威胁。属于弧菌属的途径尤其是由于它们与温度相关疾病的关联,后者在人类和珊瑚[1]和珊瑚[2]中均表现出峰值感染率。夏季温度的升高与霍乱病原体的弧菌病原体的爆发爆发相关,突出了温度对弧菌致病性的直接影响[3],尽管与温度相关感染的特定机制仍然被忽略了。弧菌Coralliilyticus是对温度波动敏感的机会性珊瑚病原体,感染多种珊瑚种类,并对礁生态系统构成全球威胁,尤其是当温度超过27°C时[4]。尽管珊瑚宿主具有多种防御机制,但细菌如V。Coralliilyticus发展了殖民和入侵的多种策略。先前的研究已经探索了这些策略,包括蛋白酶和血素蛋白的分泌,运动能力的调节以及通过预言诱导与共生细菌的竞争[2,5]。在发表在《 PLOS生物学》中发表的研究中,Mass及其同事揭示了V中2型VI型分泌系统(T6SS)的激活。在高温下[6]。他们确定了由T6SS1和T6SS2部署的抗核效应器排放的一系列抗菌效应器(图1),使其能够绕开珊瑚宿主的防御机制。这一发现加强了珊瑚病原体侵入和感染珊瑚的多功能策略。珊瑚微生物组在维持珊瑚健康中起着至关重要的作用。珊瑚动物与光合性内共生鞭毛藻和各种微生物,包括细菌,真菌,古细菌和噬菌体的多种微生物。罗森伯格(Rosenberg
高超音速能力:从无所不能的威胁到可识别的风险
2020 年,北约科学技术组织应用飞行器技术 (AVT) 专家组 008 (ST008) 将高超音速飞行器定义为“在非弹道弹道的大部分时间里在大气层内飞行,速度至少达到音速的五倍”。5 在这里,高超音速飞行器被细分为众所周知的高超音速滑翔飞行器 (HGV) 和高超音速巡航导弹 (HCM)。此外,第三组混合威胁也称为航空弹道导弹,被定义为介于弹道导弹和 HGV 之间的武器,兼具两者的特征。无论是从物理角度还是能力角度描述高超音速威胁,从军事角度来看,一般只有三个方面很重要:• 效应器的生存能力如何?• 效果能多快产生?• 可以产生哪种效果?

Quest2Ros:一个促进远程运输机器人的应用
Teleperation在多个机器人技术应用中至关重要。提到一些,它可用于在危险环境中远程操作机器人[1,2],以执行通缉轨迹的演示,以引导不同的学习方法,例如daggers [3]或扩散策略[4]。成功的远程操作系统应该主要是i)直觉,ii)机器人不可知论,iii)成本效益。应控制其笛卡尔坐标,即末端效应器的位置和方向。但是,在笛卡尔空间中直观地运行正在努力。一种常见且具有成本效益的解决方案是使用适用于在3D空间中工作的计算机鼠标,如[5]中所示。尽管有经验的用户可以通过这样的设置执行令人印象深刻的远程操作任务[4],但用户无法直接模仿
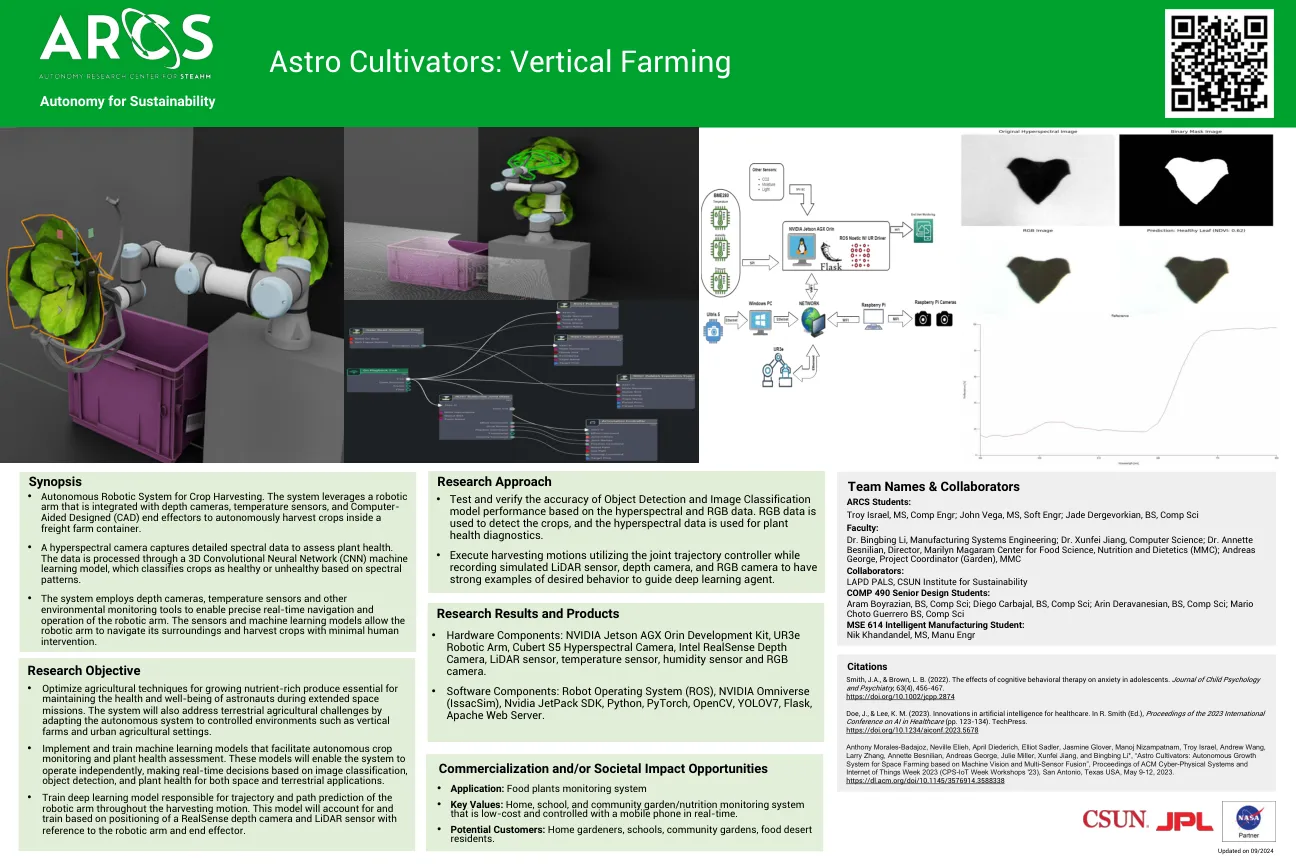
Astro耕种者:垂直农业
•优化农业技术,以生长富含养分的农产品对于在扩展太空任务期间维持宇航员的健康和福祉至关重要。该系统还将通过将自主系统调整为诸如垂直农场和城市农业环境之类的受控环境来解决地面农业挑战。•实施和训练机器学习模型,可促进自动作物监测和植物健康评估。这些模型将使系统能够独立运行,根据图像分类,对象检测和植物健康做出实时决策,以实现空间和陆地应用。•训练深度学习模型,负责在整个收获运动中对机器人组的轨迹和路径预测。该模型将根据机器人臂和最终效应器的定位来解释和训练。

Shneiderman, Ben,《以人为本的人工智能:可靠、安全且值得信赖》,arXiv.org(2020 年 2 月 23 日)。https://arxiv.org/abs/2002.04087v1(摘自即将出版的同名书籍)
本文中的 HCAI 框架引导设计师和研究人员提出新的问题并重新思考自动化/自主性的本质。随着设计师不再将计算机视为我们的队友、合作者或合作伙伴,他们更有可能开发出能够利用独特的计算机功能(包括复杂的算法、先进的传感器、信息丰富的显示器和强大的效应器)大幅提高人类绩效的技术。明确人类的责任还可以指导设计师支持人类在知识不完整的情况下在新环境中发明创造性解决方案的能力。HCAI 框架明确指出,设计卓越的目标是促进人类的自我效能、掌握能力和责任感,从而支持管理者和用户寻求的可靠、安全和值得信赖的系统。

4北京技术学院,北京100081,中国 *通信:mozhaojun@gia.cas.cn(Z.M.); liguowei@nimte.ac.cn(G.L.)收到:Novembe
完整的IBCI系统由神经信息采集设备(传感器),神经信息解析设备(处理器),功能执行设备(效应器)和反馈培训设备(反馈)组成。具体而言,“传感器”是BCI系统的关键组成部分,该系统利用神经间的技术来感知脑神经信号,包括使用微电极来记录由神经元活动产生的微妙电信号。“处理器”过滤器并放大了由“传感器”录制的模拟电信号,将它们转换为数字信号进行预处理,通过数字处理算法提取神经功能信息,并使用接近实时解码的算法将提取的信息特征转换为可理解的信号,从而将神经信息转换为可理解的信号,从而完成神经信息编解码。“ effec-

与肝炎有关的晚期发作肠道病毒感染(...
结果:11例患者患有持续性肝炎(HSCT或GT后6年的中位数)。这种情况与肝脏和/或粪便中的肠道病毒(人Aichi病毒,诺如病毒和Sapovirus)的慢性检测有关,这在Scidh-组的粪便中未发现(n = 12)。多组分分析确定了具有高I和II干扰素特征的效应器记忆CD8 + T细胞的扩展。肝炎与在调节,嵌合裂解和B细胞功能缺陷期间缺乏骨髓性有关,占具有这些特征的44例SCID患者中的25%。部分骨髓性重新植入或GT患者的患者(我们称为“与肝炎相关的肠道病毒感染”)导致T-和B细胞免疫的重构以及5例患者的肝炎的缓解,并与病毒清除相一致。

核CRISPR相关的转座子的宏基因组发现
摘要CRISPR相关的转座子(铸造)CAS基因用于RNA引导的转座。在基因组数据库中极为罕见。最近的调查报道了类似TN7样的转座子,该座子选择了I型I-F,I-B和V-K CRISPR效应子。在这里,我们通过对元基因组数据库的生物信息学搜索扩展了报告的铸造系统的多样性。我们发现了所有已知铸件的新架构,包括级联效应器的新布置,新的自动定位方式和最小的V-K系统。我们还描述了采用I型I-C和IV型CRISPR-CAS系统的新型演员群。我们对非TN7铸造的搜索确定了对水平基因转移的合作候选者。这些新系统阐明了CRISPR系统如何与转座酶一起进化并扩展可编程基因编辑工具包。

软机器人的纳米传感器外骨骼
机器人驱动的神经物理学的出现 - 在康复方案中已大大减少了恢复时间。尤其是,在基于机器人的外骨骼中集成的预先致动和感应能力通过高度强烈和重复的疗法促进了受影响的四肢的活动性。这提高了治疗的精度,并提供了一种简单的方法,用于构成评估偏见进步所需的定量数据。文献中重要的作品表明,在使用这种机器人设备的同时,在势后患者中,基于临床上LIMB的迁移率有显着改善(Abdullah等,2011)。几种设备专门为手动运动障碍患者设计。这些设备包括矫形器,外骨骼和末端效应器设备(Mayer等,2022)。矫形器提供静态支持,而电动外骨骼则可以被动和主动治疗练习