机构名称:
¥ 1.0
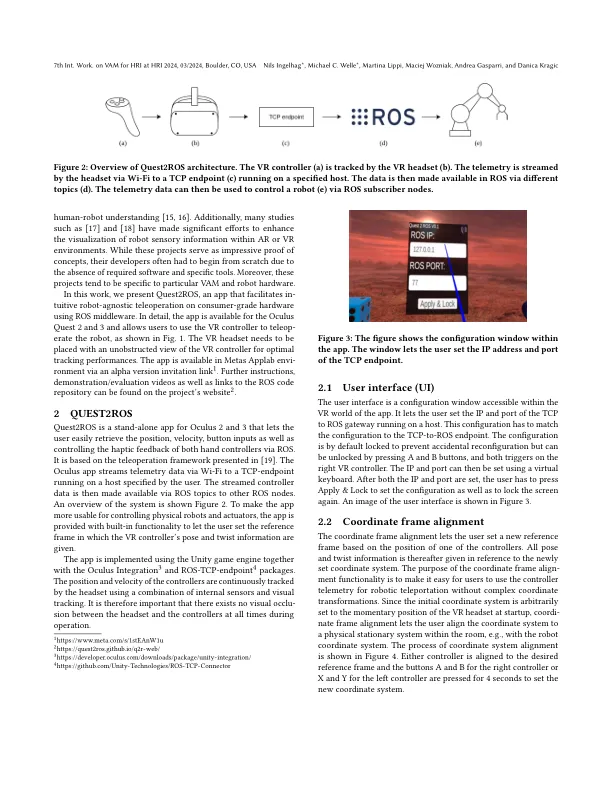
Teleperation在多个机器人技术应用中至关重要。提到一些,它可用于在危险环境中远程操作机器人[1,2],以执行通缉轨迹的演示,以引导不同的学习方法,例如daggers [3]或扩散策略[4]。成功的远程操作系统应该主要是i)直觉,ii)机器人不可知论,iii)成本效益。应控制其笛卡尔坐标,即末端效应器的位置和方向。但是,在笛卡尔空间中直观地运行正在努力。一种常见且具有成本效益的解决方案是使用适用于在3D空间中工作的计算机鼠标,如[5]中所示。尽管有经验的用户可以通过这样的设置执行令人印象深刻的远程操作任务[4],但用户无法直接模仿
Quest2Ros:一个促进远程运输机器人的应用
主要关键词


相关文件推荐