XiaoMi-AI文件搜索系统
World File Search System无人机

通过增强学习探索异质无人机群的力量
- 眼机擅长看到和监督。他们可以飞行或粘在天花板上,使他们能够快速探索该区域并找到目标或有趣的物体。- 手机旨在拾起并移动位于墙壁,架子或桌子上的东西。他们可以使用绳索连接到天花板,从而爬上墙壁和障碍物。- 脚步机器人是带轮机器人,它们用来与其他脚步机器,携带手机或运输物体相连。本文还提到,脾脏的项目将移动群机器人技术的元素与HU manoid Robotics相结合,并且每种机器人类型的专业化是实现人形群的关键部分。此外,该论文说,它将在以下各节中介绍这些机器人的硬件功能,并提及模拟环境的开发,以使其更易于测试和原型机器人行为。
设计使用自适应隐形的无人机
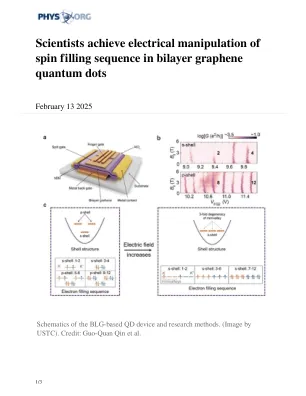
为了进一步阐明自旋,山谷和Minivalley自由度之间的相互作用,研究人员在外部磁场下进行了磁转运测量。这些测量结果提供了对自旋和山谷填充序列的见解,表明旋转填充序列可以从“ 2 + 2 + 4 + 4”变为“ 6 + 6”。这种过渡表明,可以利用Minivalley的自由度来电气操纵自由度,这一发现对量子控制和对电子状态的操纵产生了深远的影响。

沿快速火车线的无人机检查任务的定量空气风险评估
摘要 - 大规模空中交通数据的可用性,包括运行非常低的飞机,为定量评估无人机中空碰撞风险开辟了新的可能性,尤其是。超出视觉路线操作。使用参考定性方法,特定的操作风险评估(SORA)以及文献启发的两种定量方法,本文的贡献归结为对这种风险的三倍评估。定量评估通过估计来自真实数据的分布和指标而不是使用通用假设,从而充分利用了通过合作技术(例如ADS-B和Flarm)收集的数据。在以下内容中,我们对沿快速训练线进行现实的无人机检查任务进行风险分析,并展示对空气风险的定量分析如何有助于确定何时可以符合Sora的现有框架执行此类任务。关键字 - 无人飞机,ADS-B,FLARM,风险评估,空中碰撞,BVLOS操作

吸收基于无人机的GNSS ZTD进行数值天气预测
在近几十年中,各种研究表明,从地面GNSS接收器中吸收对流层参数有利于数值天气预测(NWPS)。但是,所达到的性能受到GNSS的空间分辨率的限制,尤其是在垂直方向上。在过去几年中,无人驾驶汽车(UAV)(UAV)的迅速发展和不断增长的市场促进将低成本GNS硬件集成到各种自动驾驶系统中,有可能通过收集无人机来收集飞机GNSS数据并生成Zenith deal(ZTDS)来解决这一问题。机载GNSS ZTD可以充当用于获得对流层垂直剖面的辐射数据的潜在互补来源,使其有望研究在NWP中吸收高时空分辨率的GNSS ZTD的影响。

IFAC赞助了三天通过无人机飞行和电动汽车的控制系统工程奇观的国家研讨会
sopahs-护理人与联盟健康科学学院SOPLS-药学与生命科学学院 - 肥皂学院 - 职业教育与培训学院印度的职业教育与培训学院 - 印度应用科学学院SOET SOET SOET SOET SOET SOET SOET-ENGINEMERION与技术Stadpro STADPRR

一个联合学习框架,用于增强水下无人机分布式网络的数据安全和网络入侵检测
抽象的水下无人机对于科学研究,环境监测和海上操作至关重要,可以在具有挑战性的环境中收集数据。然而,他们的部署面临着低带宽,高潜伏期,信号衰减以及由于流动性和水流而导致的间歇性连通性等问题。在这些条件下,传统的集中数据处理方法效率低下,因为它们需要将大量原始数据传输到中心位置。为了应对这些挑战,本研究提出了专门针对水下网络量身定制的联合学习(FL)框架。与集中式方法不同,FL使水下无人机可以通过在本地处理数据并仅与中央服务器共享模型更新来协作训练全球入侵检测模型。这种方法可以通过确保敏感信息永远不会离开本地设备,从而降低传输过程中拦截或妥协的风险来显着提高数据安全性。此外,FL的分散体系结构固有地与水下无人机网络的动态和分布式性质保持一致。提出的框架通过利用各个无人机的局部见解来检测威胁,包括零日攻击,而无需直接暴露敏感数据,从而改善了网络入侵检测。通过保留隐私并实现协作异常检测,FL解决了水下互联网事物中的关键网络安全挑战(IOUT)。

用于建筑遗产分析的机器学习和深度学习:激光扫描和基于无人机的测量应用程序对复杂的空间网格结构
摘要:从基于现实的数据开始的3D几何形状的重建是具有挑战性的,并且由于对现有结构进行建模和建筑遗产的复杂性的困难,因此具有挑战性且耗时。本文介绍了一种方法论方法,用于对测量产出的自动分割和分类,以改善从激光扫描和摄影数据的解释和构建信息建模。的研究重点是测量19-20-21世纪后期的网状,空间网格结构,这是我们的建筑遗产的一部分,这可能需要监视维护活动,并依赖于人工智能(机器学习和深度学习),用于以下方面: 加工。专注于博洛尼亚(Bologna)的钢中的网格结构的案例研究,这项工作就数据准确性,几何和空间复杂性,语义分类和组件识别提出了许多关键问题。

LIDAR来自天空:一种基于无人机的方法,用于有效的对象检测和跟踪
这篇论文是由学者的矿山带给您的,这是密苏里州S&T图书馆和学习资源的服务。这项工作受美国版权法的保护。未经授权的使用,包括重新分配的复制需要版权持有人的许可。有关更多信息,请联系scholarsmine@mst.edu。

自主太阳能无人机中的光伏发电和电化学存储建模
开发了一种简单、高效的模拟器,用于预测光伏能的产生及其在锂离子电池中的存储,该模拟器适用于四翼自主无人机,机翼上覆盖有基于薄膜砷化镓光伏电池(III-V)的太阳能电池板。该模拟器可以预测太阳能电池板产生的有效光伏功率以及无人机飞行时的电池组电压。辐照度、太阳倾斜角和无人机欧拉角等飞行参数被视为输入参数。测得的光伏功率和电池组电压与模拟值高度一致,这使得 XSun 公司可以实际使用。这项参数研究显示了气候和地理条件对无人机自主性的影响。在晴天最佳天气条件下,无人机飞行时间可持续 12 小时。
无人机2025.cdr
•数字天空平台 - 详细信息; Challenges & Current status • Emerging Cutting Edge Technologies, Innovations, Data Driven Insights & Future Trends • Quantum Computing, IoT Integration & 5G: Enabling Faster & Reliable UAV Networks • Cyber security Challenges, Data Security & Privacy Technologies & Solutions in UAV Operations • Advanced Software Innovations & Sustainable Hardware Solutions-Make In India • Potential frontiers of UAVs and Geospatial technologies • UTM Solutions &集成•UAM,先进的空气移动性(AAM)系统 - 最新开发•自动飞行系统 - AI,机器学习,元媒体和虚拟现实的整合•数字基础架构要求•高分辨率摄像头,传感器和技术详细侦察•全球技术趋势;技术的适应和转移