XiaoMi-AI文件搜索系统
World File Search System机器

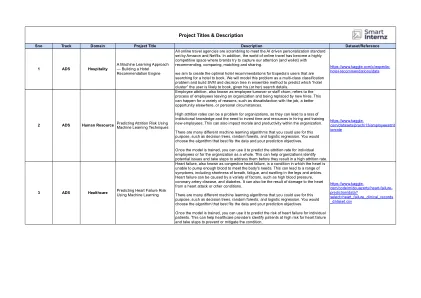
实用的贝叶斯优化机器学习算法
机器学习算法的使用经常涉及对学习参数的仔细调整和模型超参数。不幸的是,这种调整是一种“黑色艺术”,需要专家经验,经验法规或有时是蛮力搜索。因此,自动方法可以很好地呼吁,可以优化任何给定的学习算法的性能。在这项工作中,我们通过贝叶斯选择的框架来考虑这个问题,其中学习算法的概括性能是从高斯过程(GP)中建模为样本的。我们表明,对于GP性质的某些选择,例如内核的类型及其超级参数的处理,可以在获得可以实现专家级别的良好优化器方面发挥至关重要的作用。我们描述了新的算法,这些算法考虑了学习算法实验的可变成本(持续时间),并且可以利用多个内核的主体进行并行实验。我们表明,这些提出的算法可以改善以前的自动过程,并且可以针对许多算法(包括潜在的Dirichlet分配,结构化SVM和卷积神经网络)达到或超越人类专家级别的优化。


机器学习驱动的糖蛋白质组学分析标识了新型糖尿病相关的糖基化生物标志物
糖基化在包括糖尿病在内的蛋白质功能和疾病进展中起着至关重要的作用。这项研究进行了全面的糖蛋白分析,比较了健康的志愿者(HV)和DM样品,并鉴定出19,374肽和2,113种蛋白质,其中11104种是糖基化的。总共将287种不同的聚糖映射到3,722个糖基化的肽,揭示了HV和DM样品之间糖基化模式的显着差异。统计分析确定了29个显着改变糖基化位点,在DM中上调了23个,在DM中下调了6个。值得注意的是,在DM中,在Prosaposin的位置215处的Glycan HexNAC(2)Hex(2)FUC(1)在DM中显着上调,标志着其首次报道的与糖尿病的关联。机器学习模型,尤其是支持向量机(SVM)和广义线性模型(GLM),在基于糖基化特征(Glycans,糖基化蛋白质和糖基化位点)区分HV和DM样品时,可以在区分HV和DM样品时获得高分类精度(〜92%:96%)。这些发现表明,改变的糖基化模式可能是糖尿病相关病理生理和治疗靶向的潜在生物标志物。

基于机器学习的直接金属沉积中复杂刀具路径的轨道高度预测
模具行业不断要求先进的技术来提高模具在其生命周期内的性能。直接金属沉积 (DMD) 为模具翻新提供了关键机会。然而,通过 DMD 的典型刀具路径由交替的平滑段和尖角组成。在这里,能量密度和粉末数量的波动通常会导致工具恢复部分出现严重的几何偏差。这项工作提出了一种基于机器学习的新型预测方法,该方法使用与工艺参数和执行的几何形状相关的特征来表征路径。该方法的优势已在刀具路径上得到验证,刀具路径通常表征工具翻新过程。© 2022 作者。由 Elsevier Ltd 代表 CIRP 出版。这是一篇根据 CC BY 许可开放获取的文章(http://creativecommons.org/licenses/by/4.0/)

利用生物信号进行焦虑检测的机器学习
摘要:焦虑症 (AD) 是一种主要的精神疾病。然而,由于 AD 的症状和混杂因素很多,很难诊断,患者长期得不到治疗。因此,研究人员对非侵入性生物信号的兴趣日益浓厚,例如脑电图 (EEG)、心电图 (ECG)、皮肤电反应 (EDA) 和呼吸 (RSP)。将机器学习应用于这些信号使临床医生能够识别焦虑模式并区分病人和健康人。此外,已经开发了具有多种不同生物信号的模型,以提高准确性和便利性。本文回顾并总结了 2012 年至 2022 年发表的将不同的机器学习算法应用于各种生物信号的研究。在此过程中,它提供了当前发展优缺点的观点,以指导未来焦虑检测的进步。具体而言,这篇文献综述表明,对于样本量为 10 至 102 名参与者的研究,测量准确度在 55% 至 98% 之间,非常有希望。平均而言,仅使用 EEG 的研究似乎获得了最佳性能,但使用 EDA、RSP 和心率可获得最准确的结果。随机森林和支持向量机被发现是广泛使用的机器学习方法,只要进行了特征选择,它们就会产生良好的结果。神经网络也被广泛使用,并提供良好的准确性,其优点是不需要进行特征选择。这篇综述还评论了模态的有效组合以及检测焦虑的不同模型的成功。
通过扩展主动推理进行目标导向规划和目标理解:通过模拟和物理机器人实验进行评估
摘要:我们表明,通过扩展主动推理框架,可以在目的论框架中制定目标导向的行动规划和生成。所提出的模型建立在变分递归神经网络模型上,具有三个基本特征。这些特征是:(1)可以为静态感官状态(例如要达到的目标图像)和动态过程(例如围绕物体移动)指定目标;(2)该模型不仅可以生成目标导向的行动计划,还可以通过感官观察来理解目标;(3)该模型根据从过去的感官观察推断出的当前状态的最佳估计,为给定目标生成未来的行动计划。通过在模拟移动代理以及执行对象操作的真实人形机器人上进行实验来评估所提出的模型。

SCARA 机器人的电影设计和力分析...
摘要——气动技术在工业中的应用受到广泛青睐,因为它具有广泛的可用性和无污染的流体,因此有可能取代工业中的其他系统。在工业机器人领域,很少设计带有气动伺服电机的机械臂,因为对此的研究很少。该技术是一种带反馈的闭环重复控制系统,使其在工业过程中的实施成为可能。由于气动工业机器人很少,本研究旨在设计一个原型,通过运动学的解析对位置进行精确控制并降低气动系统的非线性随机性,这将为所需应用的气动伺服电机的机械调整提供必要的信息以及对传输模拟的解释。本研究提供了一个完全气动和功能齐全的机器人原型的制造模型,为未来应用于工业机器人的气动控制研究开辟了领域。

循环脉冲神经网络的非线性动力学与机器学习
人们对由相对少量相互作用的神经元组成的各种集合和大型神经形态系统进行了研究 [1±6]。在《Physics Uspekhi》中,许多综述介绍了使用非线性物理方法研究大脑和神经集合中的动态过程的相关主题 [7±18]。最近,对工作大脑的认知和功能特性进行建模已经成为神经动力学的前沿 [19±21]。尤其是,人们对这一主题越来越感兴趣,这与创建能够重现自然智能关键特性的人工智能系统有关 [22, 23]。为了解决这类问题,有必要建立新的动态模型,这些模型首先可以重现复杂的层次组织,其次可以重现神经元结构的可塑性,因为它们的组成以及结构之间和结构内的连接会根据信息输入的存在与否而变化。迄今为止,已经开发出两种动态建模方法 [24, 25]。其中一种方法是所谓的自上而下的方法,模型采用大脑活动模式——模拟大脑高级过程的积分变量 [20]。另一种方法自下而上,对于可以重现大脑高级功能的神经结构模型,首先,基于对神经元和结构之间连接的真实描述,建立单个神经元的模型 [25, 26]。显然,这两种方法的生物学相关模型都应该基于实验数据。在神经生理学家对大脑进行的实验研究中,神经元的活动是在受试者休息时或受试者执行某项任务时记录的。基于实验数据的模型可以通过两种方式开发。第一种是数据驱动建模,即重建一个动态系统,该系统产生的时间序列在数量上接近实验记录的时间序列。第二种方式是基于所考虑的行为问题建模,即

B.Tech。 (vii sem。)17EC27-微波工程 Arthur Samuel机器学习实验室
klystron管:两个空腔klystrons - 结构,速度调制过程和Applegate图,束束工艺 - o/p功率和效率的表达式。反射klystrons - 结构,Applegate图和工作原理,束数学理论,功率输出,效率,O/P特征。