XiaoMi-AI文件搜索系统
World File Search System模式控制

50 至 150 VIN、28 V 5 A 同步降压转换器 ...
此参考设计是一款 28 V 输出、5 A 同步降压转换器,适用于输入范围为 50 V 至 150 V 的太空应用。TPS7H5001-SP PWM 控制器控制功率级。INA901-SP 感应电感电流并向控制器提供电流反馈,从而实现平均电流模式控制和输出短路保护。如果不需要这些功能,可以移除 INA901-SP,并使用电压模式控制运行 TPS7H5001-SP。TPS7H5001-SP 的可调死区时间允许优化开关 MOSFET 的时序,从而在 100 V 输入下实现超过 94% 的效率,在 50 V 输入下实现超过 96% 的效率。包含一个自偏置电路,可直接从输出为控制电路供电。如果提供外部 12 V 偏置,则可以移除自偏置电路,从而提高效率。
社交媒体对小型和...
航天器的操作需要一个至关重要的控制方案来加以执行任务。因此,滑动模式控制(SMC)是能够满足航天器控制操作要求的Ro-Bust Control方法之一。经典SMC在控制输入中会产生chat不休,这可能会导致移动机械部件的磨损,例如执行器。因此,许多研究人员在SMC中引入了修改,以减轻chat不休的缺点。SMC控制开发可以分为两组;低阶滑动模式控制(LOSMC)和高阶滑动模式控制(HOSMC)。详细说明,HOSMC需要与LOSMC相比具有复杂的控制算法,但具有更明显的动态响应。因此,需要一个新的LOSMC,产生与HOSMC相似的结果,但在对照算法中的复杂性较小。sev-sever选定的SMC方法;航天器的态度和orientation模型(SAOM)和航天器会合和对接演习(SRDM)。此分析是评估新的LOSMC控制开发的现有SMC技术,优势和劣势的重要媒介。首先,在SAOM和SRDM上分析了所提出的LOSMC,其中结果与HOSMC进行了比较。然后,在新的LOSMC和HOSMC上实现了优化技术(粒子群优化(PSO))。PSO帮助SAOM和SRDM改善了瞬态轨迹。新的LOSMC是设计的,并且可以作为具有低复杂性算法的HOSMC执行。最后,这将及其在SAOM和SRDM上的表现提供有用的SMC控制策略信息。

局部系统不同控制方法的分析...
摘要 — 社区微电网控制策略比较研究是对社区微电网运行的各种管理方法进行对比的分析。该研究的目的是评估各种控制方案的优缺点,并找出提高微电网性能的最佳方法。控制方法包括孤岛模式控制、混合模式控制、并网模式控制,以及结合经济调度和最佳功率流的先进控制策略,这些控制策略通常在研究中进行比较。建立了比较。取决于包括弹性、成本效益、效率、稳定性和可靠性在内的要素。比较研究的结果揭示了特定社区微电网的最佳控制方法,其中考虑到了可用资源、当地能源消耗和其他变量。本综述还强调了使用先进控制系统的优势,这些系统通过控制分布式能源资源 (DER)(例如太阳能光伏、风力涡轮机、储能和传统发电机)之间的复杂相互作用,最大限度地提高能源管理、保持电网稳定性并提高整体系统性能。通过使用先进的方法和电网连接模式管理,可以提高太阳辐射高、风力发电有限的农村地区的能源效率。需求响应减少了对外部电网的依赖和相关费用,同时提高了弹性。定制控制策略对于最大限度地提高社区微电网性能至关重要。其中包括对多种控制系统的讨论,包括分布式控制、电网形成控制、能源管理和优化、频率和电压调节、孤岛运行和需求响应。

基于 SiC MOSFET 的高效交错升压...
摘要 碳化硅 (SiC) MOSFET 属于宽带隙器件家族,具有低开关和传导损耗的固有特性。SiC MOSFET 在较高工作温度下的稳定运行引起了研究人员对其在高功率密度 (HPD) 功率转换器中的应用的兴趣。本文介绍了基于 SiC MOSFET 的两相交错升压转换器 (IBC) 的性能研究,用于调节多电飞机 (MEA) 中的航空电子总线电压。已经开发了 450W HPD、IBC 进行研究,当由 24V 电池供电时,可提供 28V 输出电压。提出了一种 SiC MOSFET 的栅极驱动器设计,可确保转换器在 250kHz 开关频率下运行,降低米勒电流和栅极信号振铃。峰值电流模式控制 (PCMC) 已用于负载电压调节。将基于 SiC MOSFET 的 IBC 转换器的效率与 Si 转换器进行了比较。实验获得的效率结果表明,SiC MOSFET 是重负载和高开关频率操作下的首选器件。关键词:高功率密度 (HPD)、交错升压转换器 (IBC)、多电飞机 (MEA)、峰值电流模式控制 (PCMC)、碳化硅 (SiC)

航空航天系统的动态和控制
此转载是对航空航天系统的动态,控制和致动的全面研究,解决了航空航天工程中的关键挑战和创新解决方案。通过整合新的方法论和实际应用,该重印展示了空间操纵器的分布式控制中的进步,无拖力卫星的状态依赖性控制,全天候立方体的混合推进系统以及用于Aero-Engine Engine和Spacecra的先进策略。探索了各种技术,包括滑动模式控制,模型预测控制,分散的LQR和自适应模糊控制,以实现轨迹跟踪,振动抑制以及集成指导和控制的强大解决方案。 此外,这种重印强调了高级材料和传感技术的变革性潜力,例如压电传感器,纤维Bragg光栅(FBG)系统和智能材料,以增强振动抑制,结构健康监测和系统可靠性。 通过理论建模,计算分析和实验验证的结合,研究提供了对航空航天系统的设计和优化的整体观点。 针对研究人员,工程师和专业人员,该重印是理解航空动态,控制和驱动技术的最新进步和未来方向的宝贵资源。探索了各种技术,包括滑动模式控制,模型预测控制,分散的LQR和自适应模糊控制,以实现轨迹跟踪,振动抑制以及集成指导和控制的强大解决方案。此外,这种重印强调了高级材料和传感技术的变革性潜力,例如压电传感器,纤维Bragg光栅(FBG)系统和智能材料,以增强振动抑制,结构健康监测和系统可靠性。通过理论建模,计算分析和实验验证的结合,研究提供了对航空航天系统的设计和优化的整体观点。针对研究人员,工程师和专业人员,该重印是理解航空动态,控制和驱动技术的最新进步和未来方向的宝贵资源。

TCAN1046V-Q1 双汽车故障保护 CAN 收发器数据表 (Rev. C)
TCAN1046V-Q1 收发器支持高达 8 兆比特每秒 (Mbps) 的传统 CAN 和 CAN FD 网络。TCAN1046V-Q1 包括通过 V IO 端子进行的内部逻辑电平转换,允许将收发器 IO 直接连接到 1.8 V、2.5 V、3.3 V 或 5 V 逻辑 IO。两个 CAN 通道通过待机引脚支持独立模式控制。这样可以将每个收发器置于其低功耗状态、待机模式,而不会影响另一个 CAN 通道的状态。在待机模式下,TCAN1046V-Q1 支持通过 ISO 11898-2:2016 定义的唤醒模式 (WUP) 进行远程唤醒。TCAN1046V-Q1 收发器还包括许多保护和诊断功能,包括热关断 (TSD)、TXD 显性超时 (DTO)、电源欠压检测和高达 ±58 V 的总线故障保护。

生物电代码
自古以来,人们就认识到,某一物种的卵子会发育出具有该物种相应解剖结构的个体(图 1 A)。这是如何发生的?是什么造成了后生动物具有如此显著的多尺度复杂性,从组织中细胞类型的分布到身体器官的拓扑形状和排列,再到整个身体结构的几何布局?人们普遍认为答案就在基因组中,但事实并非如此简单;DNA 只是编码特定的蛋白质,没有直接编码解剖结构。因此,从第一原理可以清楚地看出,模式控制涉及一种代码:卵子或其他细胞类型内解剖位置和结构的编码,以及在细胞实现不变形态发生时对这些信息进行逐步解码(图 1 B)。应该指出的是,目前对这些代码的理解还处于起步阶段,许多基本问题仍有待解决。尽管遗传学和分子基因组学取得了进展,我们仍然无法预测

使用障碍物避免策略
摘要:导航水下环境提出了控制和本地化技术的严重挑战。未知领土的成功导航需要实现目标的自动操作,同时避免遇到障碍,并提出一个重大问题。使用传感器数据和避免障碍技术的基于检测的控制对于自主水下车辆(AUV)的自主权至关重要。本研究的重点是开发基于滑动模式控制(SMC)的控制方法,并利用成像声纳传感器进行避免障碍物。提出的方法包括用于俯仰和深度控制的控制器,以避免固定物体。采用高斯电位功能来指导AUV的助手并避免障碍物。许多模拟结果评估了AUV在现实模拟条件下的控制性能,从而评估了准确性和稳定性。模拟结果的实验表明,使用海底环境模拟模型,我们在导航各种障碍(例如柔和的上升,陡峭下降和水下壁)方面的表现出色。

AN10211 TJA1040 高速 CAN 收发器
图 2 中的框图描述了 ECU 的内部结构。通常,ECU 由独立收发器(此处为 TJA1040)和集成 CAN 控制器的主机微控制器组成,由电压调节器供电。虽然高速 CAN 收发器需要 +5 V 电源电压来支持 ISO11898 总线电平,但新的微控制器产品越来越多地使用 3.3 V 等较低电源电压。在这种情况下,微控制器电源需要专用的 3.3 V 电压调节器。协议控制器通过串行数据输出线 (TXD) 和串行数据输入线 (RXD) 连接到收发器。收发器通过其两个总线端子 CANH 和 CANL 连接到总线线路,这两个总线端子提供差分接收和发送功能。对于 TJA1040,引脚 STB 连接到主机微控制器的 I/O 引脚,用于操作模式控制。可以使用引脚 SPLIT 进一步改进分裂终端方法,以实现共模电压的直流稳定(第 4.4 节)。
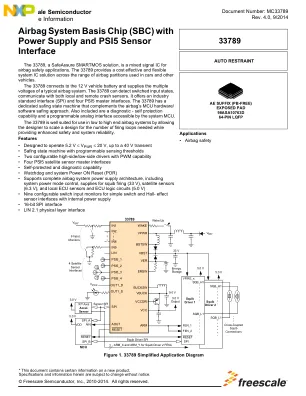
MC33789,带电源和 PSI5 传感器接口的安全气囊系统基础芯片 (SBC) - 数据表
33789 非常适合用于低端到高端安全气囊系统,因为它允许设计人员根据所需的触发环路数量扩展设计,同时提供增强的安全性和系统可靠性。 特性 • 设计工作电压为 5.2 V V PWR 20 V,最高瞬态电压为 40 V • 具有可编程感应阈值的安全状态机 • 两个具有 PWM 功能的可配置高侧/低侧驱动器 • 四个 PSI5 卫星传感器主接口 • 自我保护和诊断功能 • 看门狗和系统上电复位 (POR) • 支持完整的安全气囊系统电源架构,包括系统电源模式控制、引爆器触发电源 (33 V)、卫星传感器 (6.3 V) 以及本地 ECU 传感器和 ECU 逻辑电路 (5.0 V) • 九个可配置开关输入监视器,用于简单开关和霍尔效应传感器接口,带内部电源 • 16 位 SPI 接口 • LIN 2.1 物理层接口