XiaoMi-AI文件搜索系统
World File Search System立体
![通过立体移动的π延伸反应[7]用作分子扳手](/simg/b\b8176793f51d60fb236b8e7d5964a6f0dd6ce298.webp)
通过立体移动的π延伸反应[7]用作分子扳手
由线性融合的多环芳烃(PAH)组成,取决于它们的大小,形状,最重要的是边缘结构。基于边缘NRS可以分类为coveed,扶手椅边缘和锯齿形边缘NRS。9 - 13 Cove-Edge-NRS 14具有特别的兴趣,因为它们有可能是手性的,这是由于Cove地区的空间障碍引起的非平面性。圆形的NRS可以采用扭曲的con,无论是螺旋的还是摇摆的(随机扭曲),包括沿着其边缘的特定c s层。15 - 18然而,由于螺旋构和摇摆构构之间的最小相对能量差异,由于内部海湾的手性迅速,螺旋构和摇摆构构之间的相对能量差异很小。14,19,20具有ord区域的NR,例如Wang等人的Supertwistacene 21。和三分之一的HBC(Hexa- peri -hexabenzocoronene)22由Campana等人。- 表现出较高的屏障,可以室温手性分辨率。带有海湾区域的纳米摄影师相对扭曲相对困难,因为大多数环在正交平面上占据了,替代方案有限。
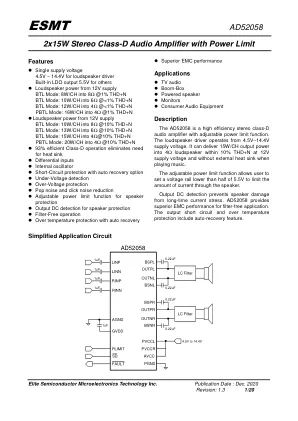
AD52058 2x15W立体声级音频放大器带有功率...
AD52058是具有可调节电源限制功能的高效率立体声类音频放大器。扬声器驱动程序的操作性为4.5V〜14.4V电源电压。它可以在12V电源电压下10%THD+N以内的4扬声器传递15W/CH输出功率,并且在播放音乐时没有外部散热器。

与立体定向放射治疗的荟萃分析和比较
本研究遵循系统评价和荟萃分析的首选报告项目 (PRISMA) 指南。[59] 我们在 Lilacs、PubMed 和 Cochrane 数据库中进行了搜索,使用以下搜索词关联:LITT、脑肿瘤、脑转移和复发性 GBM。使用以下术语搜索 SRS 研究:脑转移、复发性 GBM、姑息治疗、预期寿命、二线治疗、二线疗法、救援治疗、救援疗法、抢救治疗和抢救疗法。SRS 被定义为对至少被 50% 规定剂量包围的小颅内目标进行单次或几次高剂量辐射。在出版期内应用了一个过滤器,这指的是 2007 年 10 月 1 日之后发表的已接受论文,因为 FDA 于 2007 年 7 月批准了 Visualase®,[58] 该批准承认脑肿瘤的激光治疗。截止日期为 2019 年 1 月。如果研究 (1) 以英语、葡萄牙语、法语和西班牙语撰写,(2) LITT 或 SRS 是成人队列(≤18 岁)中采用的单一疗法,并且 (3) 以某种方式呈现患者的中位总生存期 (MOS)、无进展生存期 (PFS) 和与治疗相关的不良事件,则纳入研究。回顾性研究、前瞻性分析和病例系列都包括在审查中。排除的研究是那些没有完整报告、评论、社论和评论的研究。

分级的立体定向放射疗法对大脑和颅底
面具以两张塑料片开始。制作口罩的治疗射线照相师会在特殊设计的烤箱中逐个温暖它们,直到它们柔软而柔软。第一张纸在您的头部背面围绕,第二张纸在您的脸上轻轻模制。塑料会很温暖,但是这个过程并不舒服。一个小的塑料矩形将安装在面罩的前面,以便您轻轻地静置牙齿(如上图所示)。这也有助于保持您的静止。

立体定向神经外科微型机器人引导装置的开发
目的立体定向引导系统始终保持高精度且使用简单,对于精确的立体定向定位和缩短手术时间至关重要。尽管机器人引导系统被广泛应用,但目前可用的系统还不能完全满足结合无框架手术和机器人技术优势的立体定向引导系统的要求。作者开发并优化了一种小型但高精度的引导系统,该系统的设计使其可以无缝集成到现有的手术室 (OR) 设置中。本临床研究旨在概述这种微型机器人引导系统的开发并介绍作者的临床经验。方法在对机器人立体定向引导系统进行广泛的临床前测试后,对机器人固定、软件可用性、导航集成和末端执行器应用进行了调整。随后,在 2013 年至 2019 年期间的 150 名患者的临床系列中推进了机器人系统的开发,包括 111 次针吸活检、13 次导管置入和 26 次立体脑电图 (SEEG) 电极置入。在临床试验期间,不断进行修改以满足每种适应症的设置要求、技术规格和工作流程。对于每种应用,都会评估特定的设置、工作流程和平均手术准确度。结果在 150 例病例中,149 例可应用微型机器人系统。每个手术中的设置都成功实施,而不会增加大量的手术时间。工作流程无缝集成到现有手术中。在研究过程中,手术准确性得到了提高。对于活检手术,真实目标误差 (RTE) 从平均 1.8 ± 1.03 毫米减少至入口处的 1.6 ± 0.82 毫米 (p = 0.05),从 1.7 ± 1.12 毫米减少至目标处的 1.6 ± 0.72 毫米 (p = 0.04)。对于 SEEG 手术,RTE 从手术前半部分的平均 1.43 ± 0.78 毫米减少至后半部分入口处的 1.12 ± 0.52 毫米 (p = 0.002),从 1.82 ± 1.13 毫米减少至目标处的 1.57 ± 0.98 毫米 (p = 0.069)。所有病例均未观察到愈合并发症或感染。结论 微型机器人引导装置已成功应用于 149 例立体定向手术,证明了其多功能性和无缝集成到现有工作流程的能力。根据这些数据,机器人可以显著提高准确性,而无需增加时间支出。


立体选择性共轭氰化物通过将光毒素和有机催化
*电子邮件:p.melchiorre@unibo.t对反应的选择性的精确控制是一个基本目标。尽管在实现立体控制方面已经获得了巨大的进步,但底物内官能团(化学选择性)的选择性操纵仍然是一个挑战。醛的氰化作用提供了一个说明性的例子:1,2-将亲核氰化物添加到醛基团中是立体选择性cat-alytic过程的第一个例子之一。相比之下,即使是在紫红色的变体中,也是线性α,β-未饱和醛的共轭氰化物仍然存在染料。主要难度在于在首选氰化物1,2粘合方面达到1,4化学选择性。在这里,我们报告了一种不对称的催化方法,以实现二烷的独家结合氰化。手性有机催化剂具有可见光激活的光蛋白-DOX催化剂的协同作用促进了抑制的单电子还原,从而诱导了正式的极性反转。在特征上具有亲核的手性自由基被具有完美的1,4化学选择性和良好立体控制的亲电氰化物源拦截。
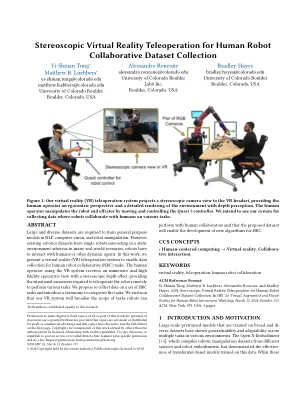
人类机器人协作数据集收集的立体虚拟现实tretoperation
需要大型和多样化的数据集来训练NLP,计算机视觉和机器人操纵中的通用模型。但是,现有的机器人数据集具有在静态环境中交互的单个机器人,而在许多现实世界中,机器人必须与人类或其他动态代理进行交互。在这项工作中,我们提出了一个虚拟现实(VR)远程操作系统,以启用人类机器人协作(HRC)任务的数据收集。使用VR系统的人类操作员获得了具有立体深度效应的沉浸式和高保真性自我的视野,从而提供了远程远程进行机器人以执行各种任务所需的情境意识。我们建议收集有关一组HRC任务的数据,并引入分类法以对任务进行分类。我们设想我们的VR系统将扩大机器人可以

治疗 - 脑转移对立体定向放射外科手术的反应
随着转移性癌症患者的存活率提高,长期对脑转移的局部控制已成为越来越重要的临床优先事项。虽然共识指南建议手术,然后进行> 3 cm病变的立体证明放射外科手术(SRS),但单独使用SRS治疗的较小病变(≤3cm)会引起可变反应。为了确定对SRS变量反应的影响的因素,我们分析了未经框架基于框架单分数SRS治疗的未经全身治疗的患者的脑转移结果≤3cm。SRS之后,1733年中有259个(15%)治疗的病变证明了有关局部治疗失败(LTF)的MRIIFIST,其中202/1733(12%)证明了LTF和54/1733(3%)(3%)具有不良辐射效应。多变量分析表明肿瘤大小(> 1.5 cm)和黑色素瘤组织学与LTF率较高有关。我们的结果表明,≤3cm的脑转移对SRS并不均匀地响应SRS,并表明对单独的SR或与手术结合对脑转移的作用进行了前瞻性研究,并保证与肿瘤大小和组织学相匹配的脑转移量≤3cm。这些研究将有助于建立多学科治疗指南,以改善局部控制,同时最大程度地减少脑转移治疗期间的辐射坏死。
