XiaoMi-AI文件搜索系统
World File Search System自组织
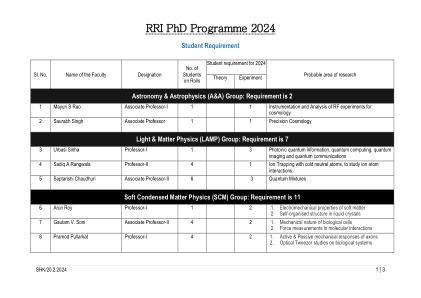
RRI 博士课程 2024
6 Arun Roy 教授-I 1 2 1. 软物质的机电特性 2. 液晶中的自组织结构 7 Gautam V. Soni 副教授-II 4 2 1. 生物细胞的机械性质 2. 分子相互作用中的力测量 8 Pramod Pullarkat 教授-I 4 2 1. 轴突的主动和被动机械响应 2. 生物系统的光镊研究

高级功能液晶材料
1,东京大学,邦基库(Bunkyo-Ku),东京,东京113-8656,工程学院化学与生物技术系,日本; 2关于上材料的研究计划,新生大学,瓦卡托,长野,380- 8533,日本关键词:液晶,自组织,纳米结构,纳米结构,超分子装配超分支超分子自我组成的liqiud-crystalline(lc)Molecules的liqiud-crystalline(LC)分子的变化,这是一定的变化,因为这是一定程度上的变化,因为它是一种变化,因为它是一种变化,因为它是一种变化,而有效地a了,这是一定的变化。由于这些动态和自组织的结构,可以诱导作用,光功能和生物功能。分子结构的设计和分子相互作用的控制是获得高功能性LC纳米组件的关键。1-7,纳米结构功能LC材料在1D,2D和3D纳米结构的设计和自组织方面呈现。材料设计与分子动力学(MD)3,8,9模拟和高级测量10,11的协作。例如,近晶型LC材料已应用于2D纳米结构的电解质7,12和水处理膜3,13。稳定的行为是2D LC电解质的锂离子电池。7,12高病毒去除,用于保留从相分离的2D近晶结构的纳米结构聚合物。通过MD模拟和X射线光谱研究了1D,2D和3D纳米结构及其高级功能的3,13关系。8,9,10,11,例如,2D相结构及其近晶型电解质摩勒的跃迁通过X射线和MD模拟获得的电子密度图的结果很好地解释了。9此外,通过对同步加速器设施的软X射线排放研究很好地解释了纳米多孔水处理LC膜的选择性特性。11液晶在基于自组织动态结构的性质的各个领域具有高功能性软物质具有巨大的潜力。致谢:对Kakenhi JP19H05715,JST-CREST JPMJCR1422,JPMJCR20H3和MEXT材料R&D Project JPMXP1122714694的财务支持。

使用基于群集的下采样方法
摘要 - 脑部计算机接口(BCI)允许其用户仅使用大脑活动与计算机或其他机器进行交互。运动障碍者是这项技术的潜在用户,因为它可以使他们在不使用周围神经的情况下与周围环境互动,从而帮助他们恢复失去的自主权。P300拼写器是最受欢迎的BCI应用程序之一。其性能取决于其分类器识别和区分p300电位与脑电图(EEG)信号的能力。为了使分类器正确执行此操作,有必要使用平衡的数据集训练它。但是,由于p300通常是用奇数范式引起的,因此只能获得不平衡的分布。本文在P300 EEG信号上采用了一种基于自组织图(SOM)的采样下采样方法,希望提高分类器的准确性。通过从健康受试者和中风后受害者获得的数据集测试了两个分类模型,一个深层喂养网络(DFN)和深信仰网络(DBN)。我们将结果与以前的作品进行了比较,并观察到我们最关键的主题的分类准确性增加了7%。对于健康和中风的受试者,DBN的最高分类准确性为95.53%和94.93%,而DFN为96.25%和93.75%。索引术语 - 脑计算机界面,神经网络,自组织图,击球后,脑电图
博士R.VADIVEL BE,ME,博士,教育...
53. LNICST – 计算机科学社会信息学和电信工程研究所 (LNICST) 2019 年讲义,无处不在的通信和网络计算丛书,“车载自组织网络安全中实体信任评估的 NB-FTBM 模型”,由 Springer - Cham -Nature 出版,瑞士,第 276 卷,第 173-187 页,2019 年,DOI https://doi.org/10.1007/978-3-030-20615-4-13,印刷版 ISBN 978-3-030-20614-7,ISBN 978-3-030-20615,2019 年 5 月 16 日。

迈向主动的人机协作
人机协作 (HRC) 引起了研究人员和工程师的浓厚兴趣,因为它可以提高操作的灵活性和效率,从而实现大规模个性化。然而,现有的 HRC 开发主要以人为本或以机器人为中心,按照预先定义的指令进行操作,远未实现机器人自动化和人类认知的有效结合。认知计算、工业物联网和机器人学习的人机层面信息处理的主流研究为弥合现场操作员、机器人和其他制造系统之间的知识提炼和信息共享之间的差距创造了可能性。因此,一种可预见的基于信息学的认知制造范式——主动 HRC,被引入作为共生 HRC 的一种高级形式,其高水平的认知团队合作技能将逐步实现,包括:1)协作认知,在对人类和机器人情况的整体理解的基础上,在执行循环中建立双向同理心; 2)时空协作预测,估计人机对象在分层子任务/活动中的交互情况,以便进行主动规划;3)自组织团队合作,聚合分布式 HRC 系统的知识,进行自组织学习和任务分配。除了描述它们的技术核心外,还进一步讨论了主要挑战和潜在机会,以便为实现主动 HRC 做好准备。

机器人团队行星探索
自太空探索开始以来,火星和月球一直被轨道器、着陆器和探测车所探索。超过四十个任务瞄准火星,一百多个任务瞄准月球。开发用于探索天体的新型策略和技术仍然是航天机构的重点。多机器人系统对于行星探索尤其有前景,因为它们对单个故障更具鲁棒性,并且有可能探索更大的区域;但是,操作员可以单独控制的机器人数量是有限的。我们最近参加了欧洲航天局在西班牙兰萨罗特岛的月球/火星模拟站举行的跨学科设备测试活动 (PANGAEA-X)。我们使用了一群无人机 (UAV) 来研究系统操作和人为因素的相互作用。人类操作员通过自组织网络和数据共享协议指挥群体在两种控制模式下探索未知区域:一种是操作员分别指示每个机器人;另一种是操作员为群体提供一般指导,群体通过分布式决策和共识建立相结合的方式进行自组织。我们通过瞳孔测量评估每种情况下的认知负荷,并通过自我报告评估感知到的任务需求和直觉性。我们的结果表明,通过群体智能实现更高的自主性可以减少工作量,让操作员有时间执行其他任务,例如监督策略和沟通。未来的工作将进一步利用群体智能的进步进行探索任务。
AN/PRC-163 - L3Harris
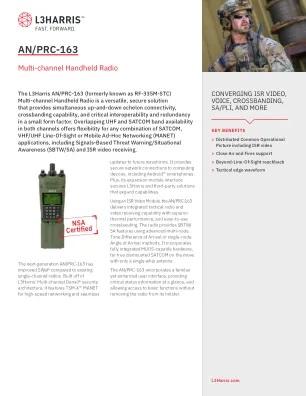
L3Harris AN/PRC-163(以前称为 RF-335M-STC)多通道手持无线电是一种多功能、安全的解决方案,可在小巧的外形中提供同时上下梯队连接、跨频带功能以及关键的互操作性和冗余性。两个通道中重叠的 UHF 和 SATCOM 频段可用性为 SATCOM、VHF/UHF 视距或移动自组织网络 (MANET) 应用的任意组合提供了灵活性,包括基于信号的威胁警告/态势感知 (SBTW/SA) 和 ISR 视频接收。
苏格兰儿童战略计划 2023-28
这一战略体现了董事会与“改变我们的世界”(我们的儿童和青少年顾问小组)、员工团队、会员和更广泛的网络之间的大量对话和会议。然而,与专门针对战略计划而设计的对话同样重要的是过去一年的积极倾听。组织最丰富的学习成果来自与战略本身无关的对话和工作,而是与战略需要生存和产生影响的世界有关的对话和工作。我们自组织成立以来三十年来的学习成果也是我们制定这一战略的重要基础。
应急通信工具包 (CCK)
L3Harris CCK (12206-2100-01) 是专为前沿战术作战控制应用而设计的下一代模块化盒,可与现场数字辅助近距空中支援 (CAS) 系统无缝集成。该盒采用市场上最小的外形尺寸,同时仍保留当今现代战场所需的核心功能。可扩展平台支持各种 C5ISR 解决方案,包括但不限于:LOS、SATCOM、移动自组织网络 (MANET) 以及与现有网络基础设施和设备集成的能力。盒内包含开始运行所需的一切。

多智能体 Swarm 实现... - G2NET
多智能体多信使环境低频感知的群体实现 F.Bonsignorio 我们正在开发一种可重复、可衡量的方法来部署由空中无人机、移动地面机器人、水下滑翔机、ROV 和放置在地面或海底的固定或移动传感器组成的复杂自适应网络。该方法利用 Voronoi 图、由多智能体信念空间规划方法框架构建的不同种类化学和非化学传感器的多传感器融合。我们的项目整合了 FER 的 AIFORS 实验室、萨格勒布大学、Heron@CNR 联合实验室和华沙大学的资源,并伺机寻求国家、欧洲和国际层面的资金,旨在将一种新的自组织传感器网络概念与在开放式环境中行动的机器人群相结合。从环境中提取信息和绘制环境地图被组织为两个新兴的并发过程。当各个群体成员随机探索环境时,网络会创建节点。群体的自组织和成长过程由基于群体成员之间相互信息函数的适应度函数控制。联网传感器会根据已部署的传感器点本地计算出的更高熵度量,更密集地释放到环境中。当适应度函数(表示群体成员之间的相互信息)达到最大值时,就会创建节点。