机构名称:
¥ 1.0
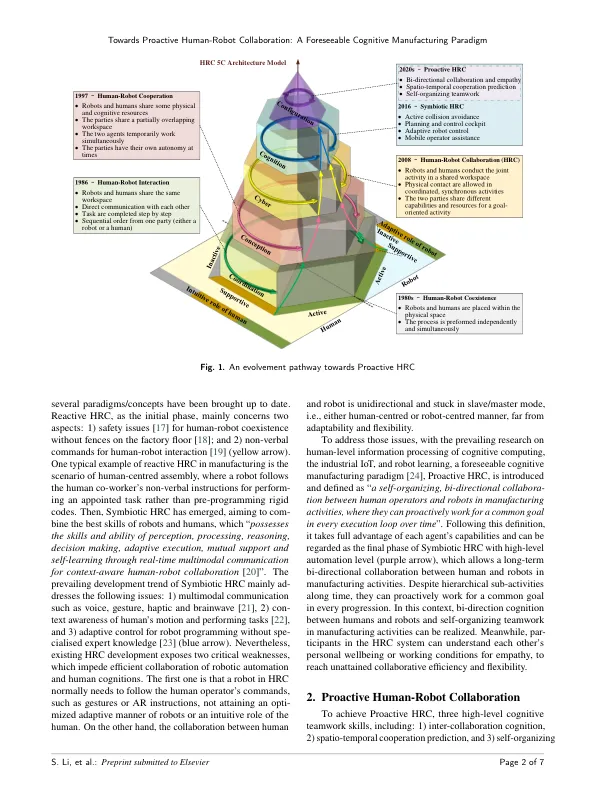
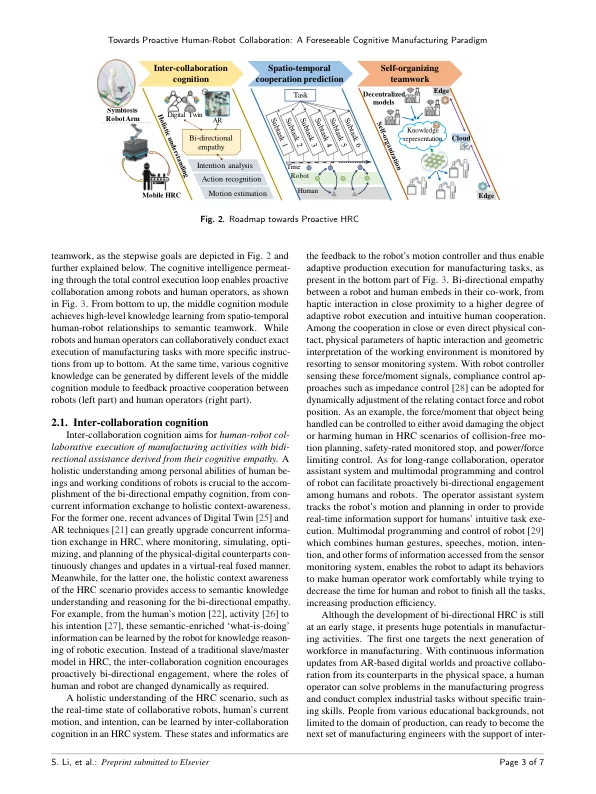
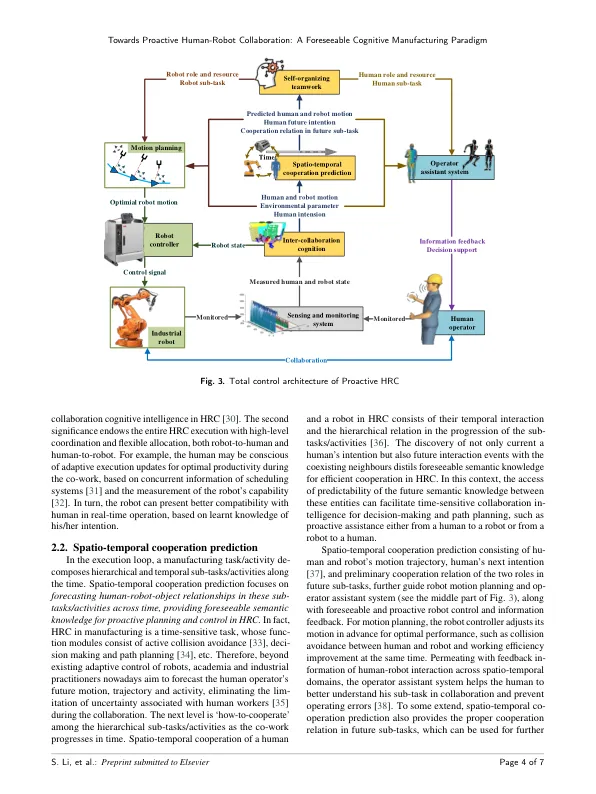
人机协作 (HRC) 引起了研究人员和工程师的浓厚兴趣,因为它可以提高操作的灵活性和效率,从而实现大规模个性化。然而,现有的 HRC 开发主要以人为本或以机器人为中心,按照预先定义的指令进行操作,远未实现机器人自动化和人类认知的有效结合。认知计算、工业物联网和机器人学习的人机层面信息处理的主流研究为弥合现场操作员、机器人和其他制造系统之间的知识提炼和信息共享之间的差距创造了可能性。因此,一种可预见的基于信息学的认知制造范式——主动 HRC,被引入作为共生 HRC 的一种高级形式,其高水平的认知团队合作技能将逐步实现,包括:1)协作认知,在对人类和机器人情况的整体理解的基础上,在执行循环中建立双向同理心; 2)时空协作预测,估计人机对象在分层子任务/活动中的交互情况,以便进行主动规划;3)自组织团队合作,聚合分布式 HRC 系统的知识,进行自组织学习和任务分配。除了描述它们的技术核心外,还进一步讨论了主要挑战和潜在机会,以便为实现主动 HRC 做好准备。
迈向主动的人机协作
主要关键词


相关文件推荐