XiaoMi-AI文件搜索系统
World File Search System航路点
基于连续的航路点和可及性分析的不确定性下的安全和适应性自主导航
本文为基于可靠的状态空间可达性分析提供了一种安全自主导航的新方法。后者改善了基于顺序航路点(NSBSWR)框架[1]的已经提出的灵活导航策略[1],同时考虑了建模和/或感知方面的明显不同的不确定性。的确,NSBSWR是一个新兴的概念,可以利用其灵活性和通用性,以避免频繁的复杂轨迹的计划/重新计划。本文的主要贡献是引入可及性分析方案,作为可靠的风险评估和管理政策,以确保连续分配的航点之间安全自主导航。为此,使用间隔分析来传播影响车辆动力学到导航系统指出的不确定性。通过求解具有不确定变量和参数的普通微分方程,通过间隔泰勒串联扩展方法揭示了所有车辆潜在的可触及状态空间。根据可达集的获得的界限,对导航安全做出了决定。一旦捕获了碰撞风险,风险管理层就会采取行动以更新控制参数,以掌握关键情况并确保适当地达到Waypint,同时避免任何风险状态。几个模拟结果证明了在不确定性下总体导航的安全性,效率和鲁棒性。

Sentry-H 6110-MP-Codan Communications
在空中航路点上,用户界面促进了与其他用户在空中的直线分享。消息呼叫机制提供了一种直观的方法,可以从Waypoint列表中选择,包括和传输多个航路点。收到包含路点的消息呼叫后,可以将路点保存到航路点列表中,并用于立即距离和轴承图。此功能大大简化了共享和跟踪一组广播用户之间地理位置信息的过程。

半自动导航的规定时间控制障碍函数
本文提出了对控制屏障功能(CBF)的新颖使用,以在半自动导航方案中执行规定的时间安全,其中航空车辆通过一系列航路点导航。特别是,我们使用规定的时间控制障碍功能(PT-CBF)来确保车辆接近航路点附近并通过航路点本身之间的最小遍历时间。激励申请是需要在板载人员进行视觉确认路点可用性的应用程序。PT-CBF可以确保达到规定的最小航向遍历时间,并且如通过仿真所示,它们还允许更快地完成任务,该任务完成了,该任务比在指定持续时间内激活传统CBF的简单策略。

HS.748 系列 2A,G-OPFW - GOV.UK
从比萨起飞时,他们借助水甲醇辅助飞行,按照非标准方式向“SPEZI”航路点起飞,然后爬升至 FL160。在爬升过程中,米兰控制中心建议他们通过瑞士阿尔卑斯山的“CANNE”航路点向北飞行,而不是按照计划向西飞行。指挥官接受了重新规划的路线,但误将“CANNE”航路点误认为是位于法国南部戛纳镇附近的 CANNES/TANNERON VOR。虽然机组人员遵循了 ATC 的指示,继续向北飞行,但他们对最终的路线仍有疑虑。在接近意大利海岸线上的热那亚 (GEN) VOR 时,机组人员收到了 GPWS“PULL UP”警告,并立即开始爬升。当他们爬升至 FL180 时,副驾驶按下了无线电高度计测试按钮,立即取消了 GPWS 警告。
Synapsis NX-智能桥梁控制
ECDIS NX是一种现代的,用户定义的电子图表显示和信息系统(ECDIS),可有效支持导航器的日常任务和用例。广泛的标准功能和选项包括单个可伸缩面板,以最大程度地提高图表的视图,快速访问基本功能,智能和向导指导的工具,用于路线规划,ETA计算以及单个航路点,雷达视频叠加,GEO对象事件的各个航路点的进步速度以及更多。
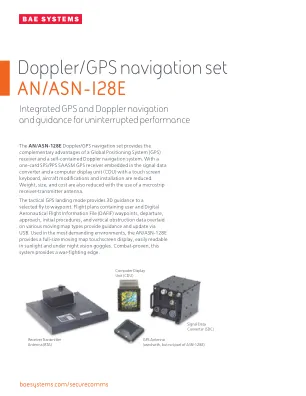
多普勒/GPS 导航装置 AN/ASN-128E - BAE 系统
战术 GPS 着陆模式为选定的飞行航路点提供 3D 引导。飞行计划包含用户和数字航空飞行信息文件 (DAFIF) 航路点、出发、进近、初始程序和垂直障碍物数据,这些数据叠加在各种移动地图类型上,可通过 USB 提供引导和更新。AN/ASN-128E 可在最苛刻的环境中使用,提供全尺寸移动地图触摸屏显示器,在阳光下和夜视镜下也易于阅读。该系统经过实战验证,可提供作战优势。
NAT 操作期间驾驶舱横向偏差的人为因素问题
本研究调查了与北大西洋 (NAT) 使用半度航路点坐标有关的已报告横向飞行路径偏差。此类航路点在驾驶舱显示器上的显示标签可能不明确,这可能会导致机组人员出错。我们探讨了问题的严重程度和潜在的缓解措施。我们还审查了与驾驶舱数据输入相关的文献,以便输入和验证航线。这包括对美国国家参考系统 (NRS) 命名约定的研究的审查,该系统是一种类似于 NAT 使用的网格结构。然后,我们分析了 2017 年至 2019 年 6 月 NAT 中报告的横向偏差。我们仅发现 8 次偏差有与航路点显示标签相关的证据:3 次偏差大于 10 海里,5 次偏差小于 10 海里,空中交通管制进行了干预以防止更大的偏差。NAT 操作的指导文件已经解释了防止横向偏差的有效机组策略。我们没有进一步的驾驶舱程序建议。但是,我们确实探索了与其他潜在缓解措施相关的益处和注意事项。我们还讨论了对美国基于轨迹的运营 (TBO) 的潜在影响,因为 TBO 可能会使用半度航路点。
北大西洋 (NAT) 飞行运行期间横向偏差的驾驶舱人为因素问题
本研究调查了与在北大西洋 (NAT) 使用半度航路点坐标有关的已报告横向飞行路径偏差。此类航路点在驾驶舱显示器上的显示标签可能不明确,这可能会导致机组人员失误。我们探讨了问题的严重程度和潜在的缓解措施。我们还审查了与航线输入和验证相关的驾驶舱数据输入文献。其中包括对美国国家参考系统 (NRS) 命名约定的研究的审查,该系统是一种类似于 NAT 上使用的网格结构。然后,我们分析了 2017 年至 2019 年 6 月 NAT 报告的横向偏差。我们只发现 8 次偏差有与航路点显示标签相关的证据:3 次偏差大于 10 海里,5 次偏差小于 10 海里,空中交通管制进行了干预以防止更大的偏差。NAT 操作的指导文件已经解释了防止横向偏差的有效机组策略。我们没有进一步的驾驶舱程序建议。不过,我们确实探讨了其他潜在缓解措施的好处和注意事项。我们还讨论了对美国基于轨迹的作战 (TBO) 的潜在影响,因为 TBO 可能会使用半度航路点。

i-sairas 2024 UWB基于A ...
在两个任务中,我们贡献了一个配备3D激光扫描仪映射的漫游车系统。为了使3D激光扫描对齐以获取环境的全球地图,需要将初步的姿势估计附加到单个扫描中[4]。我们使用移动和等待方案,在该方案中,操作员根据3D激光扫描决定了航路点,并使用了几个RGB相机图像来进行情境意识。共享一个单一的目的地姿势帐户,以了解行星任务中存在的通信约束。对于字段操作,实现了图形用户界面,以便轻松选择下一个航路点[12]。流动站然后自动驱动到目标目的地,然后重复周期。这种驾驶模式需要始终知道机器人姿势,因此本地化是至关重要的。
Primus Apex 为 Viking Air 的 Twin Otter 提供 - 霍尼韦尔航空航天
飞行管理系统 • 第 2A 阶段引入了双 FMS 安装选项,无需任何额外硬件,支持 – 综合导航数据库 – 图形 INAV 和飞行计划 – 主要和次要飞行计划 - 每个飞行计划 100 个航路点 - 1000 个存储的飞行员定义航路点 - 3000 个存储的飞行计划 – 精密和非精密进近 – SID/STAR 程序 – 广域增强系统 (WAAS) – 全套 RNAV 进近 - RNP - LNAV/VNAV - LNAV - LPV - 大角度进近和着陆 – 垂直下滑道 (VGP) 模式 – 垂直导航 (VNAV) – 直达功能 – 自动航段转换 – 自动倾斜角限制 – 平行偏移 – 天气备用 – 大容量存储模块 – PC 飞行计划工具