机构名称:
¥ 1.0
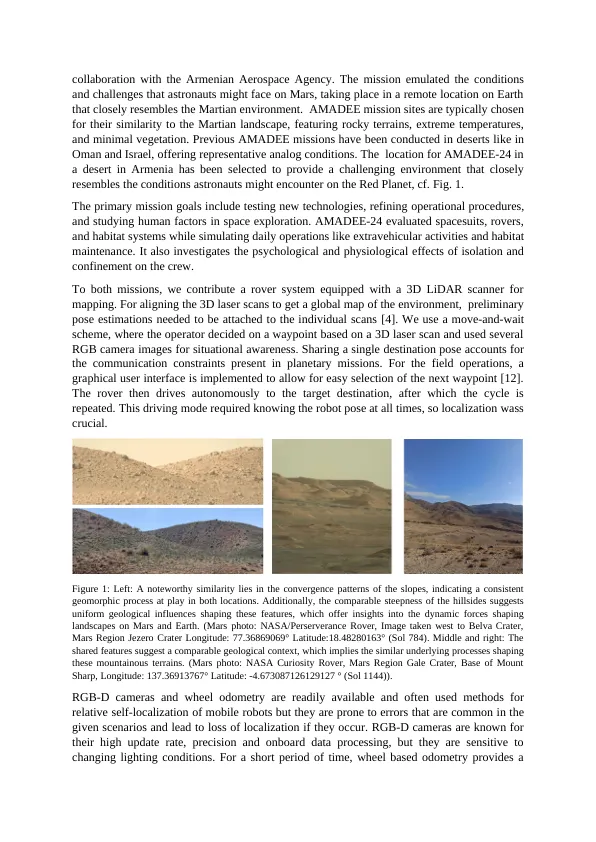
在两个任务中,我们贡献了一个配备3D激光扫描仪映射的漫游车系统。为了使3D激光扫描对齐以获取环境的全球地图,需要将初步的姿势估计附加到单个扫描中[4]。我们使用移动和等待方案,在该方案中,操作员根据3D激光扫描决定了航路点,并使用了几个RGB相机图像来进行情境意识。共享一个单一的目的地姿势帐户,以了解行星任务中存在的通信约束。对于字段操作,实现了图形用户界面,以便轻松选择下一个航路点[12]。流动站然后自动驱动到目标目的地,然后重复周期。这种驾驶模式需要始终知道机器人姿势,因此本地化是至关重要的。
i-sairas 2024 UWB基于A ...
主要关键词



相关文件推荐