XiaoMi-AI文件搜索系统
World File Search System车载

安全汽车车载协议 - Eurecom
当前,车载 IT 架构的研究活动主要遵循两个主要趋势:网络通信统一化和功能集中化。最近的车载 IT 架构包含非常多样化的通信网络技术,例如 CAN、LIN、FlexRay 和 MOST。目前正在研究基于互联网协议 (IP) 的通信,以作为未来车载通信系统中电子控制单元 (ECU) 互连的统一技术 [9]。此外,多用途 ECU 和微控制器中闪存技术的使用也在不断转变。除了汽车车载 IT 架构设计的这些趋势之外,新的外部通信接口(固定和无线)也正在成为车载架构不可或缺的一部分。这一发展的一个关键因素是集成基于 V2X 通信(车辆的外部通信,例如与其他车辆的 V2V 通信,或与基础设施的 V2I 通信)的未来电子安全应用 [13,3],该通信已被确定为提高所有车辆和相应智能交通系统的运行效率和质量的一项有前途的措施。固件更新对于汽车领域至关重要,因为召回是一项非常昂贵的活动,因此应尽可能避免。谷歌已经为其 Android 展示了远程更新设备的实用性
车载听觉警报文献综述
估计此次信息收集的公共报告负担平均为每份回应 1 小时,包括审查说明、搜索现有数据源、收集和维护所需数据以及完成和审查信息收集的时间。请将有关此负担估计或本次信息收集任何其他方面的评论(包括减轻负担的建议)发送至国防部华盛顿总部服务处信息行动和报告局 (0704-0188),1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302。受访者应注意,尽管法律有任何其他规定,但如果信息收集未显示当前有效的 OMB 控制编号,则任何人均不会因未遵守信息收集而受到任何处罚。请不要将您的表格寄回上述地址。
AN/VRC-100 先进 HF 地面/车载...
军事用户需要一种易于操作、多功能、全数字信号处理 (DsP) 高频无线电,用于各种地面或移动应用。这就是罗克韦尔柯林斯设计 VrC-100 的原因,它为战术作战中心、空中交通管制和车辆应用(如高机动性多用途轮式车辆 (HMMWV))提供超视距通信。
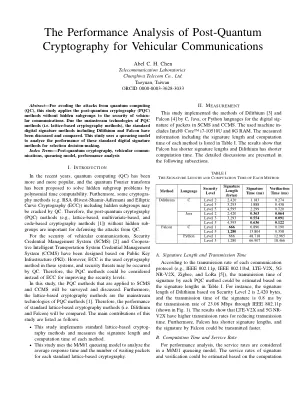
车载通信后量子密码性能分析
近年来,量子计算 (QC) 越来越受到人们的重视,人们提出了利用量子傅里叶变换通过多项式时间可计算性来解决隐藏子群问题。此外,一些包含隐藏子群的密码方法 [如 RSA (Rivest-Shamir-Adleman) 和椭圆曲线密码 (ECC)] 可能会被 QC 破解。因此,没有隐藏子群的后量子密码 (PQC) 方法 [如基于格、基于多变量和基于代码的密码方法 [1]] 对于防御 QC 攻击具有重要意义。对于车辆通信的安全,已经基于公钥基础设施 (PKI) 设计了安全证书管理系统 (SCMS) [2] 和合作智能交通系统证书管理系统 (CCMS)。然而,这些系统中使用的密码方法都是 ECC,QC 可能会带来安全威胁。因此,可以考虑使用 PQC 方法代替 ECC 来提高安全级别。本研究将调查和讨论应用于 SCMS 和 CCMS 的 PQC 方法。此外,基于格的密码学方法是 PQC 方法的主流技术 [1]。因此,将比较标准基于格的密码学方法(即 Dilithium 和 Falcon)的性能。本研究的主要贡献如下。

空地一体化车载网络调查...
车辆之间以及车辆与路侧单元 (RSU) 之间的交互和协作。因此,超可靠和低延迟无线通信技术起着至关重要的作用。联网后,车辆不仅可以扩展其感知能力以到达盲点,还可以联合处理传感数据并协调其驾驶决策,从而实现更安全的自动驾驶和更高效的道路交通。凭借这些巨大的潜力,联网汽车范式已被广泛视为汽车革命的下一个前沿。国际数据公司 (IDC) 预测,到 2023 年,全球近 70% 或美国 90% 的新轻型汽车和卡车将配备嵌入式连接。在中国复杂的驾驶环境下,联网和自动化汽车尤为重要,因为中国的道路充满了汽车、自行车和行人等混合交通。这就是为什么

智能Ecockpit和车载安全解决方案
•设计 - 硬件,IO,存储:信任体系结构•制造 - 密钥生成,供应,更新:安全的配置工具•软件 - 操作系统,应用程序,权限:可信Linux•连接性 - 连接 - 远程访问,通信,网络安全套件
来自 IACP 车载研究的研究和最佳实践...
致谢:国际警察局长协会车载摄像头项目工作人员谨向以下人员致以最诚挚的谢意:• 评估团队成员在整个评估过程中的经验、勤奋和奉献精神• 顾问委员会对车载摄像头项目的专业知识和指导• 47 个州和 2 个测试站点的局长、专员、主任和警司在整个评估过程中的支持和合作• 参与调查过程和访谈的警察高管、经理和一线警官• 感谢我们来自每个州机构和测试站点的联络点在进行现场评估时提供的帮助和指导• 美国司法部社区警务服务办公室主任 Carl Peed,他在认识执法部门面临的新兴技术问题方面发挥了领导作用,COPS 办公室对车载摄像头项目的支持和资助• 国际警察局长协会州和省级理事会主任 Dave Tollett,如果没有他的帮助和指导,本车载摄像头项目无法完成(有关参与者的完整信息请参阅附录)

车载检测针对性的 CAN 总线攻击
大多数车辆使用控制器局域网总线进行组件之间的通信。已经侵入车载网络的攻击者经常利用该总线来控制车辆的安全相关组件。这种有针对性的攻击场景通常很难被网络入侵检测系统检测到,因为特定的有效载荷通常不包含在其训练数据集中。在这项工作中,我们描述了一种使用通过遗传编程建模的决策树的入侵检测系统。我们评估了这种方法与人工神经网络和基于规则的方法相比的优缺点。为此,我们对特定的针对性攻击以及文献中描述的几种类型的入侵进行了建模和模拟。结果表明,遗传编程方法非常适合根据传感器值之间的复杂关系来识别入侵,我们认为这对于特定针对性攻击的分类很重要。然而,该系统对其他类型的攻击的分类效率较低,我们评估中的替代方法可以更好地识别这些攻击。因此,进一步的研究可以考虑混合方法。
RTO和Linux正在定义车载计算
此外,与通用OS相比,RTOSE的代码线较少。这给OEM带来了一些好处。从安全的角度来看,较少的源代码转化为攻击者靶向攻击者的表面积较小,减少风险和减轻其所需的工作。也就是说,使用使用安全开发生命周期设计的RTO仍然很重要。在安全性方面,较小,较不复杂的操作系统花费更少的精力来证明功能安全标准。这些优势可以帮助OEM将车辆更快地推向市场。

生成式 AI 支持的车载网络
摘要 — 认识到生成式人工智能的集成可以为智能交通系统带来巨大的改进,本文探讨了生成式人工智能技术在车载网络中的集成,重点关注其潜在的应用和挑战。生成式人工智能具有生成真实数据和促进高级决策过程的能力,与车载网络结合可增强各种应用,例如导航优化、交通预测、数据生成和评估。尽管这些应用前景光明,但生成式人工智能与车载网络的集成仍面临着多项挑战,例如实时数据处理和决策、适应动态和不可预测的环境,以及隐私和安全问题。为了应对这些挑战,我们提出了一个多模态语义感知框架来提高生成式人工智能的服务质量。该框架利用多模态和语义通信技术,能够利用文本和图像数据创建多模态内容,为接收车辆提供更可靠的指导,最终提高系统的可用性和效率。为了进一步提高框架内信息传输和重构的可靠性和效率,以生成式人工智能支持的车对车 (V2V) 为例,提出了一种基于深度强化学习 (DRL) 的资源分配方法。最后,我们讨论了生成式人工智能支持的车载网络领域的潜在研究方向和预期进展。