XiaoMi-AI文件搜索系统
World File Search System车载

开发车载诊断系统以提高车辆可靠性
通过实施现代技术条件方法和诊断工具以及信息处理和分析的计算机方法,维护系统和汽车服务正在得到更新。在运行阶段,记录机器零件、单元和汽车系统的故障数据。这些信息被传送给开发人员,以消除故障原因并澄清用于评估可靠性的初始数据 [1,2,3]。此外,最重要的问题是汽车技术状况的控制和诊断。各种计算机设备已成功用于几乎所有技术复杂的产品,以简化与用户的交互、复杂操作程序的实施等。这意味着汽车、铁路、海运等运输行业领域的技术产品也不例外。现代车辆配备了不同的电子设备,包括组合成一个单一复合体的电子设备,即所谓的车载诊断系统。(车载诊断 (OBD) 系统)[4]。

关于使用车载二氧化碳捕集器的车辆的可行性
尽管电池电动汽车和氢燃料电池汽车在减少二氧化碳排放方面大有可为,但电气化运输仍有一些领域尚未解决,例如重型和远程全球航运业。在本观点中,我们研究了使用碳氢化合物或酒精燃料进行二氧化碳中性运输的可行性,其中二氧化碳产物在车辆上被捕获。这种方法充分利用了碳基燃料无与伦比的能量密度,而这正是这些能源密集型应用所需要的。我们考虑了所需的电力技术、基础设施和燃料,提出了一个概念。我们计算了多种车型的存储量和质量要求,并将其与其他二氧化碳中性选择(即氢燃料电池和电池电动汽车)的存储量和质量要求进行了比较,并讨论了实施该技术的研究和开发需求。

基于人工智能的先进车载自动化目标导向代理
这个问题是喷气推进实验室的首要任务,正如其最新的战略意图文件 1 中提到的那样:“未来的一些任务将长时间与地球进行有限的通信,例如在木卫二上钻穿数公里厚的冰壳,这需要系统能够评估自己的环境并独立做出决策。其他任务则需要在比与地球的通信时间更短的时间内做出反应,例如从短暂的羽流中取样。无法快速可靠地从地球接收命令的任务将需要自主探索能力,减少或完全不进行人为干预。自主性可以提高航天器的生产率,当航天器无法等待地面命令时,可以实现快速反应。”
双输入多阶段12V车载电池充电器
1。电池充电器不应被人(包括儿童)使用的人(包括儿童)使用,除非有监督或已指示如何使用负责安全安全的人使用该设备,否则不应使用降低的身体,感觉或精神和知识。应监督儿童,以确保他们不使用电池充电器。2。在任何情况下均不要更改或拆卸电池充电器。所有故障单元必须退还给redarc进行维修。不正确的处理或重新组装可能会导致电击或燃烧的风险,并且可能使单位保修失效。3。仅使用电池充电器为标准汽车铅酸,钙含量,凝胶,AGM,SLI,深循环或磷酸铁磷酸锂型12V电池充电。4。检查制造商的电池数据,并确保您选择的pro文件的“最大”电压不会超过制造商建议的最大充电电压。如果“最大”电压对于电池类型来说太高,请选择其他充电文件。5。检查制造商的电池数据,并确保充电器的“连续电流额定值”不会超过制造商建议的最大充电电流。6。使用电池充电器为铁磷酸锂电池充电时,仅具有内置的电池管理系统的电池,该电池管理系统具有内置及以上电压保护和电池平衡。7。8。9。这可能导致电池爆炸。电池充电器不打算向低压电气系统提供电源,而不是为电池充电。电缆和保险丝尺寸由各种代码和标准来指定,这些代码和标准依赖于安装电池充电器的车辆类型。选择错误的电缆或保险丝尺寸可能会对安装程序或用户造成损害,以及/或对系统中安装的电池充电器或其他设备的损坏。安装程序负责确保安装此电池充电器时使用正确的电缆和保险丝尺寸。切勿在电池或发动机附近吸烟或允许火花或浮游。人身安全预防措施10.连接到电池时,可以协助安全操作和使用电池充电器:a)佩戴完全的眼部保护和衣物保护。在电池附近工作时避免触摸眼睛。b)如果电池酸接触您的皮肤或衣服,请卸下受影响的衣服,然后用肥皂和水立即清洗皮肤受影响的区域。如果电池酸进入您的眼球,请立即用冷水至少10分钟射击眼睛,并立即寻求医疗救助。

USBCANFD-800U 用户手册
4.1 面板布局 ................................................................................................................... 6 4.2 状态指示灯 ............................................................................................................... 6 4.3 按键 ........................................................................................................................... 7 4.4 电源接口 ................................................................................................................... 7 4.5 CANFD-bus 接口 ..................................................................................................... 8 4.6 USB 接口 .................................................................................................................. 9 4.7 车载以太网接口 ....................................................................................................... 9 5. 快速使用 ................................................................................................................. 11

精灵与Jarvis:车载智能代理的特征和设计注意事项
广泛的研究提出并研究了IVA。功能目标以及设计功能已被深入讨论。ivas可以支持驾驶和非驾驶相关的任务[3,8],提供信息和协助任务以减少驾驶员的认知需求[9],提供反馈以减轻驾驶员情感状况对驾驶安全的影响[4,14],并促进驱动驾驶经验[10,11]。代理的形式,例如纯语音代理[11],虚拟药物[3]和体现的代理[9,11],是车载剂的广泛讨论的特征。其他设计特征,例如语音特征(例如语音性别[1],语音年龄[6]),语音样式(例如,信息性与对话性[11],自信与非信任[15],简化与复杂命令[2]),
插电式电动汽车二级车载充电器设计...
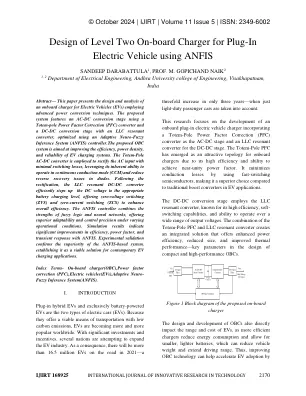
摘要——本文介绍了采用先进功率转换技术的电动汽车 (EV) 车载充电器的设计和分析。所提出的系统具有使用图腾柱功率因数校正 (PFC) 转换器的 AC-DC 转换级和使用 LLC 谐振转换器的 DC-DC 转换级,并使用自适应神经模糊推理系统 (ANFIS) 控制器进行优化。所提出的 OBC 系统旨在提高 EV 充电系统的效率、功率密度和可靠性。图腾柱 AC-DC 转换器用于以最小的开关损耗整流交流输入,利用其固有的连续导通模式 (CCM) 运行能力并减少二极管中的反向恢复问题。整流后,LLC 谐振 DC-DC 转换器有效地将直流电压升压到适当的电池充电水平,提供零电压开关 (ZVS) 和零电流开关 (ZCS) 以提高整体效率。ANFIS 控制器结合了模糊逻辑和神经网络的优势,在不同的运行条件下提供卓越的适应性和控制精度。仿真结果表明,使用 ANFIS 后,效率、功率因数和瞬态响应显著改善。实验验证证实了基于 ANFIS 的系统的优越性,使其成为当代电动汽车充电应用的可行解决方案。索引术语 - 车载充电器 (OBC)、功率因数校正 (PFC)、电动汽车 (EV)、自适应神经模糊推理系统 (ANFIS)。

适用于 HEV 和 EV 车载充电器的隔离偏置电源架构
隔离偏置电源可从 HEV 或 EV 的低压电池或高压电池获取电力。根据电源,隔离偏置电源可分为两类:低压隔离偏置电源和高压隔离偏置电源。隔离偏置电源电路可直接连接到电池,或使用预调节器连接到电池。是否需要预调节器取决于设备的宽输入电压范围能力。虽然低压电池是隔离偏置电源的常见电源,但有时低压和高压电池都用于为系统提供冗余。冗余电源可提高整个系统的功能安全性。
电动汽车车载集成新型混合可再生能源储能系统建模与分析
摘要:汽车行业和技术非常重视改进汽车,使其更加节省燃料,但与传统汽车技术相比,成本会增加;这些新车包括电动汽车 (EV)、插电式混合动力汽车 (PHEV) 和混合动力汽车 (HEV)。然而,它们在减少石油消耗和实现生命周期效率方面的显著能力为客户、行业、汽车制造商和政策制定者带来了经济效益。本文提出了一种基于可再生能源 (RER) 的 HEV 概念。所提出的 HEV 设计利用太阳能光伏能源、风能、燃料电池和超级电容器 (PV + WE + FC + SC),通过质子交换膜 (PEM) 和 SC 产生电能,以满足强大的扭矩要求。该车辆结合了电池组和 SC 以满足电力需求,并结合了 FC 作为备用能源。汽车向前行驶时,与涡轮叶片相连的交流发电机利用风能运转,通过交流发电机产生电能为电池充电。该设计旨在确保零碳排放和提高能源效率,重量轻,并采用轮毂电机来消除机械传动。使用 MATLAB® 和 Simulink® 软件包对每个子系统进行建模和仿真。使用 ANSYS Fluent 仿真来分析风能。在设计最终模型时,还考虑了标准分析,例如压力、速度和矢量轮廓。为了调节电力供应和需求,能源的选择由基于规则的监督控制器按照逻辑顺序控制,该顺序优先考虑能源,在车辆走走停停的情况下,SC 是能源,而电池是主要能源,FC 是备用能源,风能和太阳能为电池充电。车辆停放后,太阳能充电会自动开启,控制器在此期间控制交流发电机的能量流。