XiaoMi-AI文件搜索系统
World File Search System雷达

雷达相机3D对象检测的强大扩散建模框架
雷达相机3D对象检测旨在与雷达信号与摄像机图像进行交互,以识别感兴趣的对象并定位其相应的3D绑定框。为了克服雷达信号的严重稀疏性和歧义性,我们提出了一个基于概率deno的扩散建模的稳健框架。我们设计了框架,可以在不同的多视图3D检测器上易于实现,而无需在训练或推理过程中使用LiDar Point Clouds。在特定的情况下,我们首先通过开发带有语义嵌入的轻质DENOIS扩散模型来设计框架编码器。其次,我们通过在变压器检测解码器的深度测量处引入重建训练,将查询降解训练开发为3D空间。我们的框架在Nuscenes 3D检测基准上实现了新的最新性能,但与基线检测器相比,计算成本的增加很少。

2024 05 招聘信息 - 全球 - 雷达专家
● 电气工程、物理学、航空航天工程或相关领域的硕士学位或更高学位。 ● 具有雷达系统工程经验,尤其是脉冲相控阵技术。 ● 具有数字信号处理、射频/微波工程和天线设计方面的丰富背景。 ● 具有使用雷达仿真和分析软件工具(如 MATLAB、ANSYS 或类似软件)的经验。 ● 熟悉太空环境挑战,包括辐射对电子系统的影响。 ● 具有出色的分析、解决问题以及沟通和谈判技巧。 ● 能够在全球团队中协同工作并在最低限度的监督下管理项目。 ● 愿意根据需要出差

在施工环境中的强大高精度激光雷达本地化
摘要 - 准确的定位在自主机器人系统的有效运行中起着至关重要的作用,尤其是在诸如施工站点之类的染色体环境中。同时使用LIDAR传感器同时定位和映射(SLAM)已成为一种流行的解决方案,因为它在没有外部基础架构的情况下可以进行功能。但是,现有的al-gorithms表现出重大的缺点。尽管当前的方法在长期轨迹上达到了很高的准确性,但它们在复杂的室内环境中的精确性和可靠性而苦苦挣扎。本文介绍了一种新型的基于功能的LiDAR SLAM系统,旨在解决这些局限性并增强短期精度和整体鲁棒性。使用现有数据集和物理机器人平台评估了所提出的系统,以解决当前实现的局限性,并在挑战现实世界中,尤其是在施工环境中展示改进的穿孔。
QUANDO RF 项目 量子雷达项目
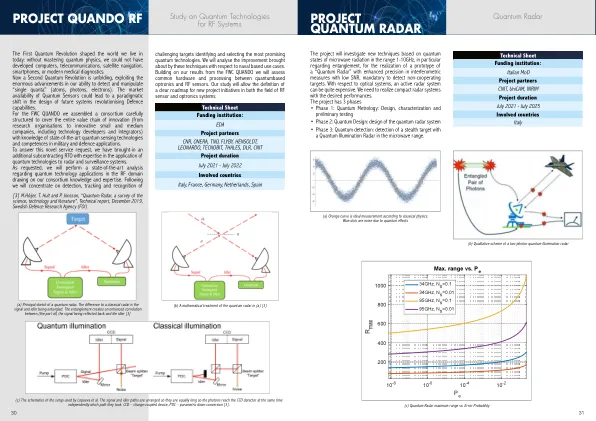
第一次量子革命塑造了我们今天生活的世界:如果不掌握量子物理学,我们就无法开发计算机,电信,卫星导航,智能手机或现代医学诊断。现在,第二次量子革命正在展开,利用了我们检测和操纵“单量子”(原子,光子,电子)的能力方面的巨大进步。量子传感器的市场可用性可能会导致未来系统的设计范围内的范式转变。对于FWC Quando,我们汇集了一个经过精心构造的财团,以涵盖整个创新的价值链(从研究组织到创新的中小型公司,包括技术开发人员和集成商),了解了先进的量子量子传感技术和军事和国防应用中的先进量子传感技术和能力。为了回答这个新颖的服务请求,我们在将量子技术应用于雷达和监视系统方面具有专业知识带来了另外的分包RTO。根据要求,我们将对RF域中的量子技术应用进行最新分析,以利用我们的财团知识和专业知识。之后,我们将集中精力进行检测,跟踪和识别
X-ICP:在极端环境中稳健本地化的可本质性感光激光雷达注册
摘要 - 在具有挑战性的环境中需要可靠的定位,需要现代机器人系统才能运行。基于激光雷达的局部化方法,例如迭代最接近的点(ICP)算法,可能会在几何无知的环境中遭受损害,这些环境已知,这些环境已知会导致点云登记性能恶化,并沿弱受约束方向推动散落的优化。为了克服这个问题,这项工作提出了i)稳健的可局部性检测模块,ii)局限性感知到的受限的ICP优化模块,该模块将其与统一的局限性检测模块相结合。通过利用扫描和地图之间的对应关系来实现所提出的可区分性检测,以分析优化的主要方向的对齐强度,作为其细粒度的LIDAR固定性分析的一部分。在第二部分中,然后将此可本质性分析集成到扫描到映射点云注册中,以通过执行受控更新或离开优化的脱位方向来生成无漂移姿势更新。所提出的方法经过彻底评估并将其与模拟和现实世界实验1中的最新方法进行了比较,证明了激光挑战环境的性能和可靠性提高。在所有实验中,所提出的框架表明没有环境特异性参数调整的准确且可推广的可局部性检测和可靠的姿势估计。

定量降水估计(QPE)天气雷达使用衰减校正和Z-R关系算法的比率
定量降水估计(QPE)天气雷达在东Java Laode Nodeman的某些部分中使用Z-R关系算法的衰减和比较Z-R关系算法,Retnadi Heru Jatmiko博士,硕士。; Emilya Nurjani博士,S.Sc.,M.Sc。

将扩散模型缩放到现实世界3D激光雷达场景完成
计算机视觉技术在自动驾驶汽车的感知堆栈中起着核心作用。使用此类方法来感知给定数据的车辆周围环境。3D激光雷达传感器通常用于从场景中收集稀疏的3D点云。然而,根据人类的看法,这种系统努力鉴于那些稀疏的点云,因此很难塑造现场的看不见的部分。在此问题中,场景完成任务旨在预测LiDAR测量中的差距,以实现更完整的场景表示。鉴于最近扩散模型作为图像的生成模型的有希望的结果,我们建议将其扩展以实现单个3D LIDAR扫描的场景。以前的作品使用了从LiDAR数据提取的范围图像上使用扩散模型,直接应用了基于图像的扩散方法。差不多,我们建议直接在这些点上操作,并介绍尖锐的和降解的扩散过程,以便它可以在场景规模上有效地工作。与我们的方法一起,我们提出了正规化损失,以稳定在denoising过程中预测的噪声。我们的实验评估表明,我们的方法可以在单个LIDAR扫描中完成场景,作为输入,与最新场景完成方法相比,产生了更多详细信息的场景。我们认为,我们提出的扩散过程公式可以支持应用于场景尺度点云数据的扩散模型中的进一步研究。1
LeoLabs 宣布哥斯达黎加太空雷达“...
“哥斯达黎加太空雷达的意义是双重的,”前 NASA 宇航员、LeoLabs 联合创始人 Edward Lu 解释道。“首先,它提供了更高级别的数据,以告知和改进我们为进入低地球轨道的新兴卫星星座提供的运营服务。我们提供的每项服务,例如防撞或早期发射跟踪,都受益于哥斯达黎加太空雷达提供的额外数据。这是基础。其次,”Lu 继续说道,“与我们的其他雷达相结合,哥斯达黎加太空雷达扩展了我们提供低地球轨道中更多物体的实时地图、描述风险并将这种见解提供给我们的客户的能力。这是对太空可持续性和飞行安全的重大贡献。”

适用于 X 波段 AESA 雷达应用的 10W GaN on SiC CPW MMIC 高功率放大器,PAE 为 44.53%
本文介绍了一种用于雷达应用的新型 X 波段碳化硅 (SiC) 共面波导 (CPW) 单片微波集成电路 (MMIC) 高功率放大器 (HPA) 设计。在设计中,采用了 0.25 μ m γ 形栅极和高电子迁移率晶体管 (HEMT),它们采用了碳化硅基氮化镓技术,因为它们具有高热导率和高功率处理能力。此外,在 8.5 GHz 至 10.5 GHz 的频率范围内,反射系数低于 -10 dB,可产生 21.05% 的分数带宽。此外,MMIC HPA 在 2 GHz 带宽内实现了 44.53% 的功率附加效率 (PAE),输出功率为 40.06 dBm。此外,由于 MMIC HPA 具有高输出功率、宽工作带宽、高 PAE 和紧凑尺寸,因此非常适合用于 X 波段有源电子扫描阵列雷达应用。索引术语 — 有源电子扫描阵列 (AESA) 雷达、共面波导 (CPW)、碳化硅 (SiC) 上的氮化镓 (GaN)、高电子迁移率晶体管 (HEMT)、单片微波集成电路 (MMIC)、高功率放大器 (HPA)。

3607059/2024/管理员 哈雷达
由 SURESH KUMAR YADAV、PO-VII、项目官员 -VII、新再生能源部和 HAREDA 于 2024 年 11 月 21 日上午 9:46 从 eOffice 生成