XiaoMi-AI文件搜索系统
World File Search SystemAVIONICS
CH-53K 航空电子管理系统 - Defense.info
您可以信赖的灵活服务解决方案。从初始交付到整个飞机生命周期,我们都会为您提供全面的服务和支持解决方案。我们的全球支持网络提供生命周期支持解决方案,包括基于性能的维护和维修、工程解决方案、备件、培训和模拟解决方案;所有这些都由业内最佳的周转时间支持。罗克韦尔柯林斯随时随地提供可靠的解决方案。

人机界面与航空电子设备之间的交互...
人为因素问题仍然是确保飞行安全以及机组人员执行飞机控制操作的优先事项,其负面影响通常与人的心理生理特征有关。对旨在减少人为因素对飞行安全影响的所提出方法、方法和技术工具的研究表明,现有的方法工具在消除航空人员“突然出现”的不可靠性方面效果不足。这种情况需要开发飞机控制系统,考虑到其所有组件的特性,并创建与航空电子系统交互的虚拟飞行员助手。本文讨论了飞行员与航空电子系统交互的各个方面。它提出了使用人机界面为飞行员在机上工作创建虚拟助手的概念,该界面提供了观察、通信和飞行控制的可能性。提出了认知飞行员-飞机界面的概念,该界面将基于知识的自适应功能引入系统,以帮助机组人员执行对飞行安全至关重要的重要任务。

航空电子开放系统架构比较
1.简介 在 2014 年 11 月举行的开放式架构峰会上,时任国防部采购助理部长的 Katrina G. McFarland 表示:“本部门正在认真尝试了解如何帮助我们的项目经理、我们的部门和我们的行业了解开放式架构及其优势,真正了解我们与知识产权相关的目标,并确保我们这样做是基于国家安全的最佳利益而不是商业案例。” [5] 认识到需要经济实惠且有效的解决方案,国防部呼吁在“更好的购买力”(BBP) 3.0 [1]、国防部指令 5000.02 [2] 和国防采购指南第 4.3.18.15 节 [3] 中使用开放系统架构 (OSA) 解决方案。这些文件的目标是避免供应商锁定、实现经济实惠的能力发展并促进创新。
迈向无人机的模块化和认证航空电子设备
为了应对这一挑战,第一代无人机航空电子架构被分为三个松散耦合的物理部分。第一部分专用于导航和飞行控制;第二部分提供传感器、硬件和软件组件,以确保所需的自主性水平;而第三部分控制无人机的有效载荷。第二和第三部分通常特定于无人机应该执行的操作角色。在大多数情况下,每个部分都由一个单片专用平台实现,该平台由最简单的处理器组成,具有自己的资源(内存和通信总线)(图 1)。90 年代和 21 世纪开发的无人机基于这一原则(例如,参见 [27] 的附录 A 和 [33] 中的 Piccolo 架构)。

航空电子设备健康监测可信度评估...
本文提供了一种使用自动测试设备(ATE)评估下机航空电子系统健康监测可信度的方法。指标包括假阳性、假阴性、真阳性和真阴性的概率。我们首次考虑了刺激信号源(SSS)的不稳定性、测量通道误差的随机和系统分量以及系统本身的可靠性特性。我们考虑了永久性故障和间歇性故障的指数分布的具体情况,并推导出计算可信度指标的公式。数值计算说明了正确和错误决策的概率如何取决于精度参数。我们表明,当刺激信号的标准偏差增加时,假阳性和假阴性的概率增加得比真阳性和真阴性的概率下降得快得多。对于甚高频全向范围 (VOR) 接收器,我们证明即使刺激信号源产生的随机误差为零,假阳性和假阴性的概率也不同于零。
数字航空电子手册 - 第二版
自组织无线网络手册,Mohammad Ilyas 生物医学工程手册,第三版,Joseph D. Bronzino 电路和滤波器手册,第二版,Wai-Kai Chen 通信手册,第二版,Jerry Gibson 计算机工程手册,Vojin G. Oklobdzija 控制手册,William S. Levine CRC 工程表手册,Richard C. Dorf 数字航空电子手册,第二版 Cary R. Spitzer 数字信号处理手册,Vijay K. Madisetti 和 Douglas Williams 电气工程手册,第二版,Richard C. Dorf 电力工程手册,Leo L. Grigsby 电子手册,第二版,Jerry C. Whitaker 工程手册,第三版,Richard C. Dorf 信号处理公式和表格手册,Alexander D. Poularikas 纳米科学、工程和技术手册,William A. Goddard, III、Donald W. Brenner、Sergey E. Lyshevski 和 Gerald J. Iafrate 《光通信网络手册》,Mohammad Ilyas 和 Hussein T. Mouftah 《工业电子手册》,J. David Irwin 《测量、仪器和传感器手册》,John G. Webster 《机械系统设计手册》,Osita D.I.Nwokah 和 Yidirim Hurmuzlu 《机电一体化手册》,Robert H. Bishop 《移动通信手册》(第二版),Jerry D. Gibson 《海洋工程手册》,Ferial El-Hawary 《射频和微波手册》,Mike Golio 《技术管理手册》,Richard C. Dorf 《变换和应用手册》(第二版),Alexander D. Poularikas 《VLSI 手册》,Wai-Kai Chen

iEFIS Explorer 简介 - MGL Avionics
SP-7 “CAN” AHRS(最多可连接 4 个以实现冗余,但每个 iEFIS 也能够根据精确的 GPS 测量显示地平线)。SP-6 “CAN” 指南针(最多可连接两个指南针系统)。RDAC XF 和 RDAC XF MAP – MGL 的新型发动机监视器。最多可连接 4 个,这意味着您可以监控最多 4 个发动机(包括涡轮机)。MGL 伺服 – 基于 CAN 的伺服兼容,在此阶段最多可连接三个(倾斜、俯仰和偏航)。MGL V6 和 MGL V10 VHF COM 无线电。这些完全兼容。最多可连接两个,并从任何 iEFIS 面板进行控制。MGL/Garrecht 模式-s 转发器。此远程安装转发器可由 iEFIS 面板完全控制。MGL 导航无线电。双 VOR、ILS、下滑道和标记接收器(目前正在开发中)。MGL 襟翼/配平电机控制器。此基于 CAN 的接口可直接驱动直流电机以控制襟翼和配平。
航空电子培训系统、安装和故障排除
和“芯片上的计算机”。它们体积小、重量轻,耗电量少,几乎没有运动部件,我相信它们可以运行一百年而不会磨损。邮票大小的数百万个半导体创造了微处理器,它很快就被称为“芯片上的计算机”。它引发了 20 世纪最伟大的技术成就:数字电子学。飞机无线电设备不仅首次能够接收、放大、振荡、过滤和执行其他简单功能,现在它还能执行逻辑运算、存储大量数据、通过一对电线发送数千条信息、警告问题、纠正自身错误 —— 而这还只是开始。
以太网Mac中航空电子学的功能安全性
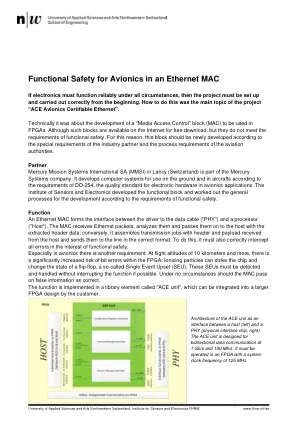
如果电子设备在任何情况下都必须可靠地运行,则必须从一开始就设置项目并正确执行。如何做到这是“ ACE Avionics Acledifif -Ethernet”项目的主要主题。从技术上讲,这是关于在FPGA中使用的“媒体访问控制”块(MAC)的开发。尽管在Internet上可以免费下载此类块,但它们不符合功能安全的要求。因此,应根据行业合作伙伴的特殊要求和航空当局的过程要求新开发该块。合作伙伴Mercury Mission Systems International SA(MMSI)位于瑞士(瑞士)是Mercury Systems Company的一部分。它根据DO-254的要求开发用于地面和飞机的计算机系统,DO-254的要求,DO-254是航空电子硬件中电子硬件的质量标准。传感器和电子学院开发了功能块,并根据功能安全的要求制定了开发的一般过程。功能以太网MAC形成数据电缆(“ PHY”)和处理器(“主机”)之间的接口。Mac接收以太网数据包,分析它们并使用提取的标头数据将其传递给主机;相反,它通过从主机接收的标题和有效载荷来组装传输作业,并以正确的格式将其发送到线路。为此,它还必须正确拦截所有错误,以实现功能安全性。在任何情况下,MAC都不得将虚假信息作为正确的信息传递。尤其是在航空电子产品中,还有另一种要求:在10公里的飞行高度上,FPGA内有明显增加的位错误风险:电离粒子可以撞击芯片并改变触发器的状态,即触发器的状态,即所谓的单个事件不满(SEU)。如果可能的话,必须检测和处理这些SEU,而无需中断功能。该功能是在称为“ ACE单元”的库元素中实现的,该函数可以由客户集成到更大的FPGA设计中。

航空航天、国防和航空电子设备用硅胶技术
我们还制定了严格的产品测试协议,采用 ASTM 标准测试方法。根据您的规格,产品在生产过程中以及发布之前必须符合某些标准。您收到的每批货物都会附有分析证书。