XiaoMi-AI文件搜索系统
World File Search SystemCue

机器学习视觉和非线性控制方法...
本文讨论了一种不使用 GPS 信号的垂直飞行器自主着陆的机器学习视觉和非线性控制方法。核心思想涉及自动化海军直升机着陆程序,其中飞行员利用船舶作为远程跟踪的视觉参考,但在最终进近和着陆阶段参考大多数海军舰艇上安装的标准化视觉提示,称为“地平线”。这个想法是使用与机器视觉集成的独特设计的非线性控制器实现的。视觉系统利用基于机器学习的物体检测进行远程船舶跟踪,并利用经典计算机视觉进行物体检测和估计飞机在最终进近和着陆阶段的相对位置和方向。非线性控制器基于视觉系统估计的信息运行,即使在存在不确定性的情况下也表现出强大的跟踪性能。开发的自主船舶着陆系统在配备机载摄像头的四旋翼垂直起降 (VTOL) 无人机 (UAV) 上实施,并在移动甲板上进行了演示,该甲板使用 Stewart 平台和相当于地平线的视觉提示模拟真实的船舶甲板运动。进行了广泛的模拟和飞行测试,以展示甲板运动时的垂直着陆安全性、跟踪能力和着陆准确性
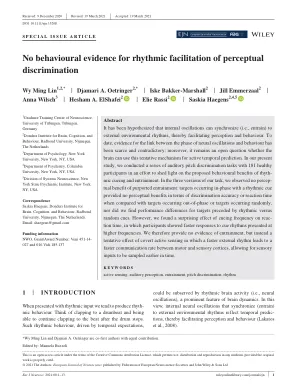
没有行为证据表明节律促进知觉辨别
摘要 有人假设内部振荡可与外部环境节律同步(即同步化),从而促进感知和行为。迄今为止,关于神经振荡相位与行为之间联系的证据很少且相互矛盾;此外,大脑是否可以使用这种试验性机制进行主动时间预测仍是一个悬而未决的问题。在我们目前的研究中,我们对 181 名健康参与者进行了一系列听觉音高辨别任务,以阐明节奏提示和同步化所提出的行为益处。在我们三个版本的任务中,我们没有观察到所谓的同步化的感知益处:与异相出现的目标或随机出现的目标相比,与节奏提示同相出现的目标在辨别准确性或反应时间方面没有提供感知益处,我们也没有发现节奏提示和随机提示之前的目标的表现差异。然而,我们发现提示频率对反应时间有令人惊讶的影响,参与者对频率较高的提示节奏反应更快。因此,我们没有提供同步的证据,而是提供了隐性主动感知的暂定效应,即更快的外部节奏导致运动皮质和感觉皮质之间的通信速率更快,从而允许更早地采样感觉输入。
非语言词典 - zorc.net
进化。我们手部的 27 块骨头、33 块肌肉和 20 个关节起源于大约4 亿年前。来自被称为鳍足类的早期鱼类的鳍片。原始的“游泳鳍”帮助我们的水生祖先在泥盆纪海洋中划桨寻找食物和配偶。在两栖动物中,前肢进化为陆地行走的负重平台。在灵长类动物中,手被单独升级为触觉天线或“触角”。今天(与鳍状肢、爪子和蹄子不同),手指与大脑的智力模块和情感中心相连。例如,我们不仅可以穿针引线,还可以用指尖模仿穿线的动作(参见 MIME CUE )——或者用轻拍来奖励孩子成功穿线。没有比手更好的器官可以衡量未说出口的想法、态度和情绪。

批准的费用结构
CHARGES (KSH) SEMESTER I II I II TOTAL Tuition 108,000 108,000 108,000 108,000 432,000 Registration 2,000 - 2,000 - 4,000 Medical 2,000 2,000 2,000 2,000 8,000 Caution Money 4,000 - - - 4,000 Material Development 3,000 3,000 3,000 3,000 12,000 Library 2,500 2,500 2,500 2,500 10,000 Examinations 11,500 11,000 11,500 11,000 45,000 Supervision fees 10,000 10,000 10,000 10,000 40,000 CUE Charges 1,000 - - - 1,000 Activity 1,000 500 1,000 500 3,000 Student ID 500 - - - 500 Students Union 400 - 400 - 800 Field Attachment 2,500 2,500 2,500 2,500 10,000 ICT & Internet Charges 2,500 2,000 2,500 2,000 9,000 Total 150,900 141,500 145,400 141,500 579,300

朝着更好的视力启发的视觉语言模型
视觉语言(VL)模型最近取得了未经证实的成功,其中连接模块是弥合模式差距的关键。尽管如此,在大多数存在方法中,富裕的视觉线索尚未充分利用。在视觉侧,大多数现有方法仅使用视觉塔的最后一个功能,而无需使用低级功能。在语言方面,大多数现有的方法仅引入浅视力互动。在本文中,我们提出了一个视觉启发的视觉语言连接模块,称为VIVL,该模块有效利用了VL模型的视觉提示。为了利用视觉塔中的较低级别信息,引入了特征金字塔提取器(FPE),以结合不同中间层的特征,该特征将视觉提示与可忽略不计的参数和计算在头顶上。为了实现VL相互作用,我们提出了深视觉条件的提示(DVCP),可以有效地进行视觉和语言特征的深层互动。我们的VIVL超过了以前的最新方法,当时是18.1苹果酒在从头开始训练可可字幕任务,这极大地提高了数据效率。当用作插件模块时,VIVL始终提高各种骨干和VL框架的性能,在多个基准测试中提供新的最新结果,例如Nocaps和VQAV2。

LAB_077 啮齿动物的情境和提示恐惧条件作用
• 行为评估最好在专门的行为套件中进行。 • 环境应远离可能影响动物行为的不受控制的外部刺激,例如人流、不必要的噪音和强光。 • 应分别测试雄性和雌性啮齿动物,每次只测试一种性别的啮齿动物。如果可能,应先测试雄性,最好在不同的日子进行,但至少要彻底清洁两性之间的啮齿动物。除非啮齿动物已经关在铁丝笼或类似笼子中,并且两性啮齿动物都在同一个房间。 • 实验者不能使用气味强烈的除臭剂或香水,并且必须有处理啮齿动物的经验,并接受过行为范式和所用设备的培训。 • SOP 的变化。如果您正在进行消退或回忆测试,恐惧条件化可能会随着提示刺激类型、给予的电击量和强度、试验间隔时间的变化而变化。任何超出本 SOP 详细说明的内容都必须向 AEC 说明,以获得他们的批准。 • 如果想要使用新气味,您必须在开始实验之前与行为设施经理讨论此事。• 16000Hz 音调已经过测试并被证明是有效的;此音调有经过验证的放大器设置。如果使用不同的声音提示,用户有责任使用分贝计确定合适的放大器设置。每个盒子中的声音不应比约 75-80dB 安静得多(因为动物可能难以区分背景噪音)或大声得多(因为震耳欲聋的声音本身可能令人厌恶)。

注意提示:凝视比箭头更难覆盖
凝视是一种将他人关注转向特定位置的重要且有力的社会提示。但是,在许多情况下,方向符号(如箭头)实现了类似的目的。是由总体问题进行的,人造系统如何有效地传达方向信息,我们进行了两个提示实验。在两个实验中,都要求参与式插图识别屏幕上出现的外围目标,并通过按下按钮尽快响应它们。在出现目标之前,屏幕中心显示了一个提示。在实验1中,提示是凝视或指向一个方向的箭头或箭头,但对目标位置无可预测。对早期研究的意见,我们发现箭头或凝视的侧面有一个反应时间益处。延伸了早期的研究,我们发现这种效应在垂直轴和水平轴之间以及面部和箭头之间是不可或缺的。在实验2中,我们使用了100%的“反预测性”提示;也就是说,目标总是发生在与凝视或箭头方向相反的一侧。具有没有固有定向含义(颜色)的线索,我们控制了一般学习效果。尽管在实验1中观察到的非预测性目光与非预测性箭头提示之间的定量匹配,但反预测箭头比中性提示的反应时间益处比对反预测性目光的相应益处更强大。这种差异可能具有实际相关性,例如,在人机相互作用的背景下设计提示时。这表明 - 如果符合其固有方向的功效,则与箭头更难覆盖或重新解释。

适用于小型无人驾驶汽车的人工智能视觉提示激光雷达
• 支持 AI 的摄像头可识别和分类物体、感兴趣的区域,以提示激光雷达进行随机测距:大大减少数据收集和处理需求 • 在存在具有挑战性的平台抖动的情况下,实现精确的视线 (LOS) 稳定指向 • 在检测到的物体周围分配禁区 • 多个体素允许正确定位禁区 • 前瞻性避障扫描作为备份 • 激光雷达数据限制为几百个点,而不是数十万个点 • 系统世界模型可以通过低带宽数据链路跨平台共享
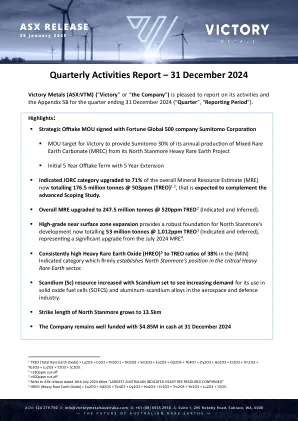
恒星加速Tumblegum South Gold Project
北斯坦莫尔重的稀土元素项目100%拥有的北斯坦莫尔·重物稀土元素(Hree)主导项目(北斯坦莫尔)位于西澳大利亚州,位于CUE以北约6公里处,可通过大北部高速公路进入密封道路。在本季度结束后,胜利宣布了北斯坦莫尔(North Stanmore)的最新矿产资源估算(MRE)24750万吨的矿产资源估算(MRE),当时520 ppm的总稀土氧化物加上氧化scandium Scandium氧化物(Treo + SC2O3),使用330ppm Treo treo confucfure(包括330 Ple Scandium of Scandium of Crove of Crove of graine of Scandium cuffsufe of grape)(TREO + SC2O3),包括高度少量的domains(吨 @ 1,012 ppm treo加上SC2O3。71%居住在指定的类别中,代表了澳大利亚富含Hree的矿床的最大指示矿产资源之一。
GoComet-横滨的AI键...
摘要:我们的世界在隐藏的贸易网络上蓬勃发展,一种发条机制,提供了从衣服到药物的所有东西。但是,当发生意外的干扰时,这种复杂的系统与纸牌屋一样脆弱。苏伊士运河的阻塞,政治冲突,甚至全球大流行者都可能陷入困境。只有可以在这些高风险游戏中占上风的组织才能占上风。Cue GoComet,骑士骑士穿着现代供应链的闪亮盔甲。GoComet的AI驱动平台提供了智能自动化和实时数据,将建模作为生命线。此案件讨论了GoComet如何帮助全球公司的横滨,由于苏伊士运河危机,Yokohama节省了80万美元。,GoComet的模型具有货运可见性,预测分析和自动报告,授权企业能够做出明智的决策,重新货运货物并与客户进行通信。此案还探讨了整个全球供应链的脆弱性,以及GoComet的创新解决方案如何彻底改变全球企业的危机管理。