XiaoMi-AI文件搜索系统
World File Search SystemFlying

采购和飞行:下一代航空采购
航空公司供应链也容易受到创新的影响。英国航空公司意识到餐饮实际上主要是物流操作;食物准备很重要,但将食物准时送到需要的地方更重要。它鼓励 DHL 进入市场,DHL 现在为希思罗机场的英国航空公司提供所有短途餐饮,食物在机场外准备。其他航空公司已从拥有机场厨房的供应商转向机场外更广泛、更具竞争力的冷冻食品选择。其他设施也可以创新。一家航空公司反对垄断休息室供应商收取的价格。当谈判失败时,它与一家空侧咖啡馆合作,开辟了一个隔离空间,并向每位商务舱乘客提供 30 美元的优惠券。休息室供应商很快回来了,提出了更好的报价。
第 9 部分 – 补充材料 - 兰利飞行学校
langleyflyingschool.com › ... PDF 2007 年 9 月 23 日 — 2007 年 9 月 23 日 尝试使用无线电收发器与救援飞机联系... 它旨在提供连续的 1 kHz 数字调谐。

飞机飞行手册(3C)术语表
化油器。1. 压力:一种液压机械装置,采用从燃油泵到排放喷嘴的封闭式供油系统。它根据通过节气门体的质量空气流量通过固定喷嘴计量燃油,并在正压下排放。压力化油器与浮子式化油器截然不同,因为它们不包含通风浮子室或位于文丘里管中的排放喷嘴的吸力拾取器。2. 浮子式:主要由一条主空气通道组成,发动机通过该通道吸入空气,一种控制相对于空气流量的燃油排放量的机制,以及一种调节输送到发动机气缸的燃油/空气混合物量的装置。

飞行汽车相关技术趋势
飞行汽车相关技术的发展正在迅速推进。随着自动驾驶汽车开始商业化,人们对飞行汽车技术发展的兴趣也日益增加。最近,一些国家推出了利用飞行汽车技术的服务以及自动驾驶汽车。汽车行业正在通过将IT技术与汽车技术相结合而发生快速变化。这一变化的中心是将集成到未来汽车上的飞行汽车相关技术。飞行汽车技术将与自动驾驶汽车技术相结合,发展成为一种更方便人类生活的工具。本文探讨了飞行汽车技术与汽车技术潮流的关系。关键词:飞行汽车、VTOL、飞行汽车技术趋势、PAV。1.引言自动驾驶汽车时代即将到来,汽车来接人并将他们送到目的地。包括谷歌在内的多家汽车公司和IT公司都在参与自动驾驶汽车的开发。自动驾驶汽车时代将成为每个人都熟悉的未来。而现在,一种超越自动驾驶汽车的新型交通工具正在引起人们的关注。在谷歌、优步等 IT 公司率先对飞行汽车表现出兴趣后,人们对飞行汽车的兴趣正在日益高涨,尤其是在美国。飞行汽车是一个最近才出现的概念,目前还没有完全一致的定义。“飞行汽车是汽车还是飞机?”这些问题的答案也很模糊。飞行汽车可以在道路上行驶,必要时也可以飞行。飞行汽车不需要像飞机那样宽阔的水平跑道,预计通过垂直升力起飞和降落。它可以像汽车一样在道路上行驶,必要时可以在天空中飞行 [9]。空中客车和英国劳斯莱斯等许多公司都在加入开发与飞行汽车相关的技术的竞争

特斯拉飞行机.pdf - 阿瓦隆图书馆
这些事实是: - UFO 是真实存在的,是基于特斯拉技术的人造电推进飞行器 - 外星人场景是一种误导性的“把戏”,目的是让人们“上瘾” - 尼古拉·特斯拉从未与任何外星实体“联系”过! - 他在 1893-4 年“制定”了他的动态引力理论 - 美国政府拒绝了他建造和开发这台机器的提议,因此他很可能在二战前转向德国人,因为他已经向他们出售了一套发电机系统。 - 所有其他碟状项目、信息和数据(AVRO、Schauberger 反冲力发动机、喷气式飞行器等)很可能是为了误导和制造混乱而发布的。 - 主流媒体和学术界对特斯拉的名字和成就的不可否认的掩盖强调了一种无法解释的姿态 - 否则为什么要不遗余力地隐藏如此重要的事情?
特斯拉飞行机.pdf - 阿瓦隆图书馆
这些事实是: - UFO 是真实存在的,是基于特斯拉技术的人造电推进飞行器 - 外星人场景是一种误导性的“把戏”,目的是让人们“上瘾” - 尼古拉·特斯拉从未与任何外星实体“联系”过! - 他在 1893-4 年“制定”了他的动态引力理论 - 美国政府拒绝了他建造和开发这台机器的提议,因此他很可能在二战前转向德国人,因为他已经向他们出售了一套发电机系统。 - 所有其他碟状项目、信息和数据(AVRO、Schauberger 反冲力发动机、喷气式飞行器等)很可能是为了误导和制造混乱而发布的。 - 主流媒体和学术界对特斯拉的名字和成就的不可否认的掩盖强调了一种无法解释的姿态 - 否则为什么要不遗余力地隐藏如此重要的事情?
自由飞翔 - 空军博物馆
从马里兰州黑格斯敦飞往加拿大艾伯塔省德温顿,飞行距离超过 2500 英里。吉利斯是飞行队长,其他三名飞行员分别是南希·巴特森、海伦·麦吉尔维里和凯瑟琳·伯恩海姆。这架飞机的巡航速度只有 100 英里每小时左右。他们于 4 月 18 日离开黑格斯敦,在伊利诺伊州乔利埃特(697 英里外)过夜,在内布拉斯加州北普拉特过夜,飞行 585 英里,然后长途飞行 846 英里到达蒙大拿州大瀑布城。4 月 21 日,他们飞行了剩下的 275 英里到达艾伯塔省德温顿。所有四名飞行员均于 4 月 23 日(星期五)晚上返回第二大队,并因其高效、迅速的交付而受到贝克上校的嘉奖,这不仅包括飞机的飞行,还包括交付所涉及的文书工作,例如飞行日志、汽油报告和 RON(过夜)信息。
新进入者和低空飞行运行 - 国际民航组织
无人机在低空空域的运行正在迅速发展,并越来越多地用于各种应用,例如农业活动、交通监控、关键基础设施监视和检查、紧急情况和火灾的快速响应以及交付等。此外,商业和业务平台(例如,交付系统)也在不断发展,这可能会大大增加无人机运行的规模以及对低空运行和空域使用的需求。虽然在目前的交通密度下限制无人机的空域访问和将不同类型的空域用户隔离以进行低空飞行操作是可行的,并且可以确保飞机的安全运行,但这些安排无法应对在低空空域运行的无人机数量不断增加的情况,这可能会与载人航空发生冲突,最终目标应该是,正如国际民航组织全球无人机系统交通管理(UTM)框架中所述,考虑到安全和效率目标,实现所有空域用户的整合和公平访问。
飞行(FLY)2000系列管制条款
1 应联系相关单兵飞行部门和贸易顾问,了解哪些飞行徽章目前已获批准使用,或之前已获批准使用。 2 请参阅 MAA 02 – MAA 主词汇表;以及 RA 2125 – 机组教练培训。注意 – 合格 AI 的定义与中央飞行学校 (CFS) 认证有关。特定类型是指该类型或航空系统标记的 CFS 认证。 3 请参阅 RA 1166 – 国防部使用和驾驶的英国民用注册飞机。
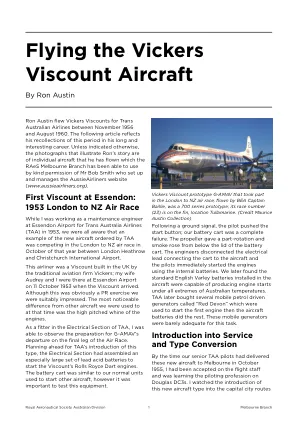
驾驶维克斯子爵飞机 - 澳大利亚航空公司
在 Viscount 上总共飞行了 7 个小时后,我被分配到机长“Chick”Clarke 的指导下,进行 50 小时的普通客运航班航线训练。我现在发现了这架英国飞机的局限性,因为它的设计航程比我们在澳大利亚所需的航程要短得多。我的第三次航线训练飞行是从墨尔本经阿德莱德飞往珀斯,我发现 Viscount 存在航程问题。从阿德莱德到珀斯的航段是我们满载燃料可以飞行的最大距离,但是,如果正常的西风增强,我们不得不考虑在距离珀斯三分之二的航程处的卡尔古利加油。这种关键的飞行不仅因为风力强而变得复杂,还因为地面和高层大气的高温。不幸的是,澳大利亚夏季气温可达 52 度,甚至像阿德莱德这样的城市也经常有超过 40 度的气温。