XiaoMi-AI文件搜索系统
World File Search SystemHu

Hexiang (Frank) Hu
技术讲座“在感知和体现中理解语言” • 谷歌,加利福尼亚州山景城 2021 年 2 月 • Facebook,纽约州纽约市 2021 年 2 月 • Waymo,加利福尼亚州山景城 2021 年 3 月 • 华盛顿大学,华盛顿州西雅图 2021 年 2 月 • 加利福尼亚大学,加利福尼亚州伯克利市 2021 年 3 月 • 密歇根大学,密歇根州安娜堡 2021 年 3 月 • 加利福尼亚大学,加利福尼亚州圣克鲁斯市 2021 年 4 月


Mengsu Hu博士 iem-newsletter-spring-2024.pdf 机械工程,2024-2025 机械工程 - 医学前选项2024-2025 b''
Mengsu Hu博士是劳伦斯·伯克利国家实验室(LBNL)的研究科学家。她的研究着重于多阶段的数值建模和机器学习,用于分析耦合热 - 氢化机械化学化学(THMC)过程,从基本地球科学到亚种面部工程工程系统(例如核废料,核废料分配,地热eRgy,Geothermal Ergy和Geologologic Hydogic Hydocic Production and Gealogologic Hydogic and Stofuction and Geothermal Science and Geoperal Science wisterspers)。她的数值方法已应用于解决基本和应用的地球科学计划中的一系列耦合过程问题。她筹集了资金,并领导了多个能源部(DOE)多学科和多人项目。胡博士是Coufrac会议的建立共同主席之一。 目前,HU博士在美国摇滚机械协会(ARMA)的董事会任职。 她已受邀在国家科学院(NAS)的PNAS Nexus(NAS),国际岩石力学和采矿科学杂志,以及Geo-Energy and Geo-Re源的地球机械和地球物理学。 在2022年,Hu博士被选为美国工程研讨会的美国工程学院(NAE)美国工程界的参与者。胡博士是Coufrac会议的建立共同主席之一。目前,HU博士在美国摇滚机械协会(ARMA)的董事会任职。她已受邀在国家科学院(NAS)的PNAS Nexus(NAS),国际岩石力学和采矿科学杂志,以及Geo-Energy and Geo-Re源的地球机械和地球物理学。在2022年,Hu博士被选为美国工程研讨会的美国工程学院(NAE)美国工程界的参与者。

ez2®AllPREP®DNA/RNA FFPE套件
商标:Qiagen®,样本到Insight®(Qiagen Group)。注册名称,商标等。在本文档中使用的,即使没有明确标记,法律也不被认为不受保护。
W HU CTC - AWS.state.ak.us
您的投标文件包(资格和投标)必须完整。请参阅随附的说明和条件。根据 15-53-204331 中的说明,将投标文件包放在密封的信封中寄回。通过传真收到的投标将不予考虑授予。投标应按照此处提供的表格提交。亲自递交的投标、修改或撤回必须在上述日期和时间之前送达 ARRC 的合同部门。投标前会议:投标前会议定于 2015 年 11 月 24 日下午 1:00(AST)举行;会议将在阿拉斯加铁路公司位于阿拉斯加州安克雷奇市西 Ship Creek 大道 327 号的三楼 Denali 会议室举行。如果贵公司需要,可以选择电话会议,电话为 (907) 265-2348。这不是强制性会议,但鼓励有兴趣的公司参加。不提供投标前现场访问。投标人未能参加投标前会议绝不会免除投标人严格遵守本招标书条款、条件和规范的真实意图和含义执行工作的责任。建议潜在投标人不得使用 ARRC 设施。合同官员:代表业主签订和管理合同的授权人员。他有权作出调查结果、决定和

HU研究摘要_smart Manufacturing 自我引导之旅
使用锂离子电池,由于电池选项卡的材料差异,传统的融合焊接技术无法应用。因此,超声波焊接被认为是一个很好的选择。使用多个传感器信号开发了一种新的在线非破坏性质量评估系统,用于质量监测电池电池。最重要的功能是使用高级特征选择算法系统地选择的,并与Ultasonic焊接过程的物理匹配。SPC和Mahalanobis距离一起集成在一起,以监视焊接过程性能[5,6,7,8]。电池组装厂中这种系统的实现导致了手动检查(80%)的重大减少,同时确保一致性电池焊接。
curriculum vitae -zhiting hu
[ 10 ] Zhengzhong Liu, Guanxiong Ding, Avinash Bukkittu, Mansi Gupta, Pengzhi Gao, Atif Ahmed, Shikun Zhang, Xin Gao, Swapnil Singhavi, Linwei Li, Wei Wei, Zecong Hu, Haoran Shi, Xiaodan Liang, Teruko Mitamura, Eric P Xing,Zhiting Hu。一个以数据为中心的NLP工作框架,关于自然语言处理的经验方法会议(EMNLP 2020),演示。

情报专家(行动)- HU - INSCOM
营销信息 文职雇员在支持陆军任务方面发挥着至关重要的作用。他们提供的技能在军队中并不常见,但对于支持军事行动却至关重要。陆军整合了军事和文职成员的才能和技能,组成了一支全军。 职位概要 这些是国防文职情报人员系统 (DCIPS) 内的军事情报文职例外职业 (MICECP) 职位。担任 DCIPS 职位的员工属于例外服务,必须遵守美国法典第 10 章以及国防部指令 1400.2 5。该职位位于美国陆军情报和安全司令部 MICECP。 此空缺公告将填补全球各地的职位。如果被选中,最初的任务将是按照 MICECP 程序执行所述职位和职责。此外,根据计划需要,被选中者将被迫在指定级别重新分配到全球职位。通常,轮换每 5-7 年进行一次。被选中者还必须接受部署以支持美国应急行动。
顽固的多变体lichen planus成功地用口服baritodinib和局部ruxolitinib奶油处理
©Springer Nature Switzerland AG 2021这项工作将获得版权。所有权利都是由出版商保留的,无论材料的全部或部分都是有关的,特别是翻译,重新使用,重新使用,插图,朗诵,广播,对缩微胶卷或以任何其他物理方式的复制,以及以任何其他物理方式以及信息存储和检索,电子适应,计算机软件,计算机软件,或类似或不同意的方法论,或者现在已知或已知的方法。使用一般描述性名称,注册名称,商标,服务标记等。在本出版物中,即使在没有具体陈述的情况下,这种名称也不意味着免于相关的保护法律和法规,因此可以免费使用。出版商,作者和编辑可以肯定地假设本书中的建议和信息被认为在出版之日是真实而准确的。就本文包含的材料或可能已犯的任何错误或遗漏而言,出版商,作者或编辑都没有提供任何明示或暗示的保修。出版商在已发表的地图和机构隶属关系中的管辖权索赔方面保持中立。
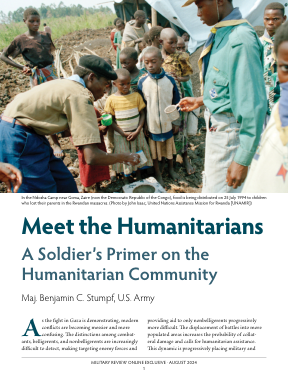
见见人道主义者:士兵的人道主义入门知识
阻碍美国陆军与人道主义界有效合作的一个主要障碍是士兵对人道主义者缺乏了解:人道主义者相信什么,他们如何行动,以及为什么这样做。认为“人道主义界”是一个单一的整体,这与以这种方式看待美国陆军一样过于简单和错误(尽管本文将使用这一术语以简化论述)。正如美国士兵是一个由机动、辅助和支持人员组成的多元化群体一样,人道主义者的思想和实践也非常多样化。与士兵的职业纽带一样,人道主义者也有团结其职业界的原则和规范。了解这些人道主义原则及其伴随的多样性是军事专业人员可以采取的关键第一步,以确保人道主义者至少不会成为障碍,并在最好的情况下在未来的军事行动中实现一定程度的团结一致。