XiaoMi-AI文件搜索系统
World File Search SystemLidar

LIDAR可用于鲁棒的exoatmospheric定位
I。虽然早期空间任务不需要精确,但现代应用,例如卫星维修和维护,可重复使用的发射车,洲际弹道导弹指导和拦截以及一些卫星到卫星通信,需要精确的位置和速度信息。全球导航卫星系统(GNSS),例如美国的全球定位系统(GPS),可用于在地球表面和低地球轨道(LEO)上进行精确定位。[1]但是,当前的GNSS系统使用少量,复杂且昂贵的卫星,这些卫星无法修复或及时更换,这意味着仅禁用少数卫星可以在大面积上破坏该系统。低接收的功率和涉及的长距离也意味着GNSS容易受到信号spoo fifg和jamming的影响。[2]面对扩散的反卫星武器和电子战系统,政府和商业实体寻求一种替代的太空导航方法可能是优先事项,该方法对对手的干扰更为强大。现有的GNSS替代方法是使用基于地面的跟踪。但是,雷达和光学信号会受到大气扭曲的影响,从而降低了位置精度。使用扩展的集成时间的持久跟踪可以克服大气变形,但这不适用于指导短时间操作。地面跟踪也受到对抗性破坏的约束。此外,单个地面站的有限视图意味着在整个轨道或轨迹中进行持续跟踪需要一个大型网络,并且在有争议或偏远地区的地球区域可能无法进行跟踪。地面数据必须从电台的分布式网络汇总,并迅速传输到车辆,在此期间,它可能会受到干扰,spoofig或其他干扰。我们引入了一种更强大的空间导航方法,该方法使用对位置纤维的自主多材料,或用大地测量的语言进行基准测试。这个
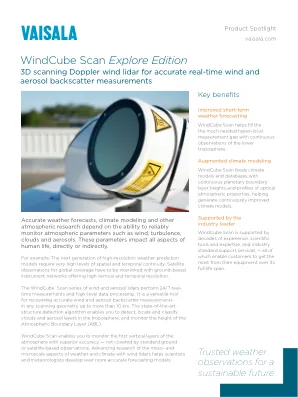
3D扫描多普勒激光雷达
参考。 B212058en-C©Vaisala 2022该材料受版权保护,所有版权都由Vaisala及其个人合作伙伴保留。 保留所有权利。 任何徽标和/或产品名称都是Vaisala或其个人合作伙伴的商标。 严格禁止未经Vaisala事先书面同意,以任何形式包含的信息的复制,转移,分发或存储被严格禁止。 所有规格(包括技术)可能会更改,恕不另行通知。参考。B212058en-C©Vaisala 2022该材料受版权保护,所有版权都由Vaisala及其个人合作伙伴保留。保留所有权利。任何徽标和/或产品名称都是Vaisala或其个人合作伙伴的商标。严格禁止未经Vaisala事先书面同意,以任何形式包含的信息的复制,转移,分发或存储被严格禁止。所有规格(包括技术)可能会更改,恕不另行通知。

机载激光雷达的应用及分析...
a 中国地质大学工程学院,武汉 430074,中国;b 中国测绘科学研究院,北京海淀区北太平路 16 号,100039,- jianfei1123@sina.com;第三委员会,第三工作组/3 关键词:海岸,应用,激光雷达,DEM,测量 摘要:激光雷达(LIDAR)是一种高精度、高密度获取三维坐标的新技术,集激光测距、计算机、GPS(全球定位系统)和 INS(惯性导航系统)于一体。潮间带地形测量是潮间带保护、开发和管理的基础工作,在我国测绘工程中占有十分重要的地位。本文简要介绍了激光雷达技术;然后在对TFACZ(潮滩与海岸带)特点与需求分析的基础上,指出LIDAR技术是解决TFACZ地理数据获取问题最有效的手段;对LIDAR技术在TFACZ地形测量中的应用进行了大量的探讨;最后利用Trimble GPS RTK系统对LIDAR数据的精度进行了检验。 1.引言

LiDAR 用于考古研究和研究...
例如中美洲和东南亚,那里的景观既没有很长的文字历史深度,也没有对正在研究的特定空间参数的详细了解。在热带地区,LiDAR 极大地改变了人们对未知景观的看法,有助于记录人类活动和热带城市化的定居点和空间参数。因此,LiDAR 对考古数据的关注点、应用和影响在世界不同地区存在显著差异。在温带地区,LiDAR 通常用于关注历史上已知或已确定的特定特征或区域,而在热带地区,LiDAR 用于了解古代景观中大量未记录的定居点分布。LiDAR 不仅在考古解释方面取得了进展,而且考古学家对它的使用也改变了 LiDAR 的收集和随后分析方式,试图最大限度地解释不同的环境参数。
激光雷达在行星科学中的未来
激光雷达 (光检测和测距) 是一种利用发射激光脉冲的飞行时间来测量仪器和目标之间精确距离的方法 ( Gardner, 1982 ; Sun, 2017 ; Zhou et al., 2017 )。当作为轨道有效载荷时,激光雷达可对表面进行连续测距测量,沿航天器轨道建立地形剖面。只要有合适的轨道和测量节奏,就可以构建整个星球的地形图,精度达到厘米到米,并具有精确的大地测量控制。对月球和火星的轨道激光雷达测量提供了全球地形图,这些图是科学研究和探索工作的基础数据集。通过测量透射和反射的激光脉冲能量,可以确定激光波长下表面的反射率,而不管自然照明条件或表面的热状态如何。从这个角度看,我简要总结了激光雷达在行星科学应用方面的历史,从阿波罗 15 号激光高度计开始,并确定了几种与最紧迫的行星科学问题相关的未来技术和测量概念。我的目的是强调如何以新的方式使用两种基本的激光雷达测量(飞行时间和接收的激光能量)来提供独特的科学测量。我将这个观点限制在行星科学激光雷达研究上,并不关注丰富的地球科学激光雷达任务、地面和机载研究,也不讨论激光雷达在导航和制导目的上的严格使用,因为它越来越多地用于航天器对接、地形相对导航 (TNR) 以及着陆制导和控制。

一项关于全球LIDAR定位的调查
对自己姿势的抽象知识是所有移动机器人应用程序的关键。因此,姿势估计是移动机器人核心功能的一部分。在过去的二十年中,LiDAR扫描仪已成为机器人定位和地图的标准传感器。本文旨在概述基于激光雷达的全球范围的最新进展和进步。我们首先提出问题并探索应用程序范围。然后,我们对方法论进行了综述,包括诸如地图,描述符的近期主题和跨机器人本地化等几个主题的最新进步。本文的内容是在三个主题下组织的。第一个主题涉及全球地方的结合和本地姿势估计。第二个主题是将单次测量升级到顺序全局定位的顺序测量值。最后,第三个主题侧重于将单机器人全局本地化扩展到多机器人系统中的跨机器人本地化。我们通过讨论开放式挑剔和有前途的全球liDar局部局限性的有希望的指示来结束调查。据我们最大的知识,这是第一个compre-

与LIDAR
关键词:点云,激光雷达,无人驾驶飞机,TLS,建筑信息建模,数据集成摘要在建筑构建和管理中使用建筑信息建模(BIM)的使用变得越来越普遍。尽管如此,已经存在的建筑物的BIM模型的产生仍然是需要大量人为努力的操作。几何可靠和完整的BIM模型的生成需要所有建筑部件的几何信息。强烈建议使用独特的采集工具获取此类信息,因此,强烈建议使用不同的采集工具和平台收购数据,以获取对建筑物的几何完整的3D描述。这项工作介绍了将获得与陆地激光扫描(TLS),无人机(无人驾驶航空车辆)激光雷达(光检测和范围)和智能手机与LIDAR相结合的程序,显示了两种案例研究的结果,两座案例研究,在Olsztyn的Olsztyn校园内的两座建筑物。最后,在两个案例研究中都使用Blender软件成功生成了BIM模型。

tc-ltio:激光雷达和视觉进程降解环境的紧密耦合激光偶尔惯性进程
自动移动机器人在交付,制造,耕作,采矿和太空探索的自动化中起着重要作用。尽管这些机器人在传统上依靠其与GNSS/INS系统的本地化[1],但在室内,室内,屋顶或茂密植被的区域,在发生信号损失的情况下,会出现挑战。为了克服这一限制,已经提出了同时定位和映射(SLAM)[2]方法。猛击通常将其分为光检测和范围(LIDAR)大满贯和视觉猛击,具体取决于所用的主要传感器。LIDAR SLAM在涉及敏捷运动和复杂结构化环境的场景中具有很高的精度和鲁棒性,这是由于其能力直接使用多个射线直接测量对象和传感器之间的距离[3]。但是,由于LiDar SLAM通过匹配每种结构扫描来执行定位,LIDAR的大满贯可以在无结构的场景中退化,例如隧道,庞大的平面和走廊[4]。另一方面,视觉猛击,利用RGB图像的纹理信息可以在无结构环境中起作用,因为它依赖基于纹理的特征,即使在缺乏明确的结构元素的场景中,也可以提取这些特征[5]。然而,视觉大满贯的规模估计有弱点,并且可以在照明条件下快速变化。为了解决LiDAR和Visual Slam的局限性,已经提出了各种LiDAR视觉大满贯方法,这些方法同时整合了LiDar和Visual Sensor的信息[6-8]。这些方法可以有效地处理结构和,因为这些方法大多数都依赖于松散耦合的方式(系统间融合)[6,7],这两个系统中的故障都会导致总体猛击失败。为了解决松散耦合方式的弱点,已经提出了紧密耦合的方法(功能间融合)[8]。

激光雷达联盟希望实现自动驾驶突破
沃尔沃汽车和芬兰高端增强现实耳机制造商 Varjo 创造了一种混合现实方法来评估原型、设计和主动安全技术。沃尔沃汽车科技基金决定投资 Varjo,将进一步加强双方的合作。沃尔沃和 Varjo 已经实现了佩戴混合现实耳机驾驶真实汽车,无缝添加虚拟元素或完整功能,让驾驶员和汽车传感器都感觉非常真实,以用于开发目的。Varjo XR-1 耳机以高分辨率提供逼真的混合或虚拟现实。它使用高清摄像头并实现混合现实。这使得设计师和工程师能够驾驶未来的汽车并在模拟环境中评估所有功能,而这些功能早在汽车问世多年前就已存在。安全专家可以在沃尔沃位于瑞典的研究机构中戴着耳机驾驶真正的汽车,通过增强现实技术在现实环境中测试虚拟主动安全系统。XR-1 中嵌入的眼动追踪技术可以评估驾驶员如何使用新功能以及他们是否分心。
针对林业应用的多回波激光雷达评估
前言 本报告由美国农业部林务局的清查与监测 (I&M) 指导委员会发起和资助。I&M 指导委员会由清查与监测研究所特许成立,旨在调查新兴技术并确定其对林务局 I&M 问题的帮助潜力。遥感应用中心感谢 I&M 指导委员会的指导和指导,以及圣迪马斯技术与发展中心提供的项目监督。作者认为,提供的意见促成了更具体的最终报告,以满足现场需求。摘要 Spencer B. Gross, Inc. (SBG) 被选中评估多回波 LIDAR(光检测和测距)技术在美国农业部林务局的应用。本研究使用的数据集位于美国西北部(俄勒冈州、华盛顿州和蒙大拿州)。三个站点有现有数据,并为另外三个站点收集了新的 LIDAR 数据。这些站点被选中是因为具有西北植被群落的代表性样本、坡度特征和土地管理处理。对于许多此类场所,辅助数据(如地图、照片、清单数据)和现有关系(即大学人员和学生、林业联系人、政府联系人)可用于验证目的。地理空间信息为有效的森林管理实践奠定了基础。使用传统技术(包括航空摄影、摄影测量和实地工作)获取高质量数据相对昂贵且耗时。某些数据元素(如西北林地可靠的 20 英尺等高线的裸地地形模型)非常难以获取。多回波 LIDAR 可以捕获密集点数据,这些数据定义第一个表面(冠层)并通过许多点撞击地面来穿透植被。因此,只需一次飞行就可以“绘制”冠层、裸地和许多结构特征,如冠层高度、体积和基部直径。LIDAR:技术机载激光扫描的发展可以追溯到 20 世纪 70 年代早期的 NASA 系统。尽管笨重、昂贵,且仅限于特定应用(例如简单测量飞机在地球表面上的精确高度),这些早期系统还是证明了该技术的价值。