XiaoMi-AI文件搜索系统
World File Search SystemOdom

Guan,J.,Sagar,L。K.,Li,R.,Wang,D.,Bappi,G.,Wang,W。,…Odom,T。W.(2020)。具有受控极化模式的量子点 - 平面激光。 由约瑟夫·加布里埃尔·曼尼(Joseph Gabriel Manion)提交的论文... 用于数据增强的MCMC算法-TSPACE 使用多孔聚酰亚胺气凝胶膜 多偏二敏过程的建模和估计 添加性生产的聚合物纳米复合材料的参数分析:一项实验和多尺度研究 活体微生物饮食摄入在休闲时间和抑郁症状之间的关联中的作用:一种基于人群的研究
图3。径向极化的QD激光是从杂种W TM -SLR纳米腔实现的。(a)在线性尺度上针对不同输入泵脉冲能的正常检测角度收集的发射光谱。插图:输出发射强度是对数字尺度上输入泵脉冲能量的函数。(b)激光发射光束的远场图案。白色箭头显示输出激光模式的极化方向。(c)在选定的极化方向下的光束轮廓。白色箭头在检测器前显示线性偏振器的偏振方向。(d)在p偏振光下的小波vector上模拟带结构。黑色圆圈指示k x = 0的w tm -slr模式。红色圆圈表示在非零K x处的W TM -SLR边带。(E)在W TM -SLR边带处模拟电场(| E | 2,单位为V 2 /M 2)。在模拟中将入射光E 0的电场设置为1 V/m。

四核基因型小鼠具有3.2mb X-y易位,可抗tlr7剂量
jasper裤子1.2†,Stefanix del 1,Jaurn Rish 1,Ajel,Ajourn 1,D。Turn Heard 3 *,Duncan T. ODOM 1 * div>
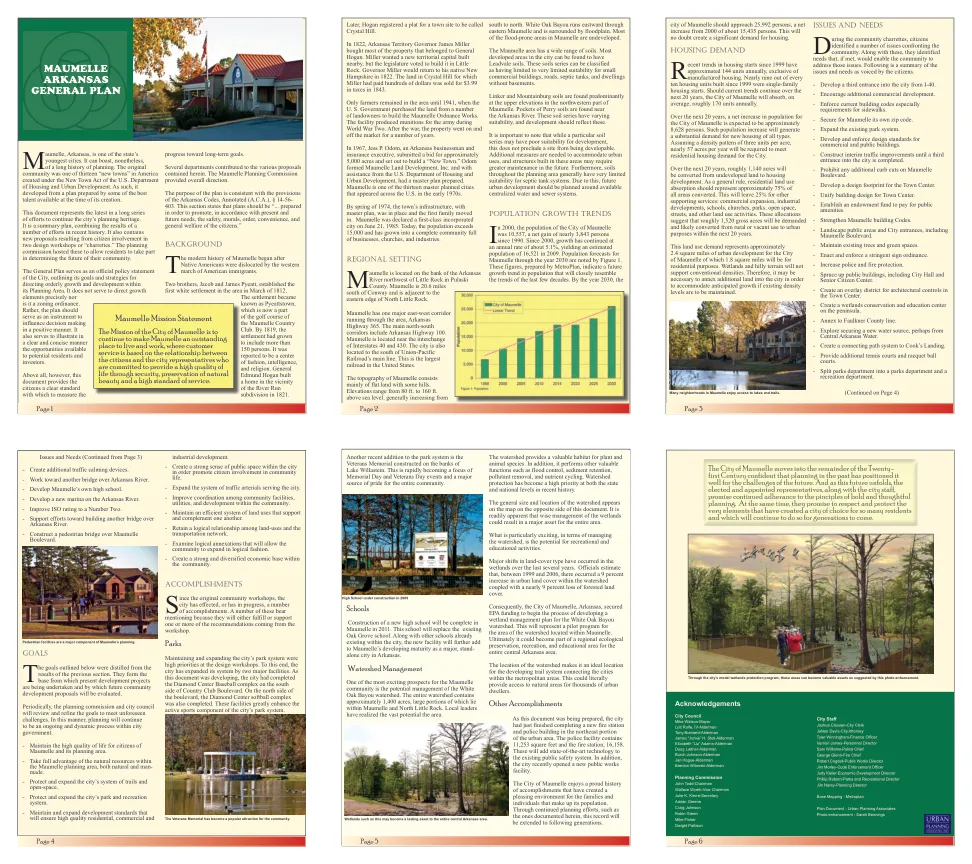
阿肯色州莫梅尔总体规划
1967 年,阿肯色州商人兼保险业高管 Jess P. Odom 投标约 5,000 英亩土地,并着手建造一座“新城”。Odom 成立了 Maumelle Land Development, Inc.,并在美国住房和城市发展部的帮助下制定了总体规划。Maumelle 是 20 世纪 70 年代初美国出现的 13 个总体规划城市之一。到 1974 年春天,该镇的基础设施和总体规划已经到位,第一个家庭搬了进来。Maumelle 于 1985 年 6 月 21 日被宣布为一级注册城市。如今,人口超过 15,000 人,已经发展成为一个拥有商业、教堂和工业的完整社区。
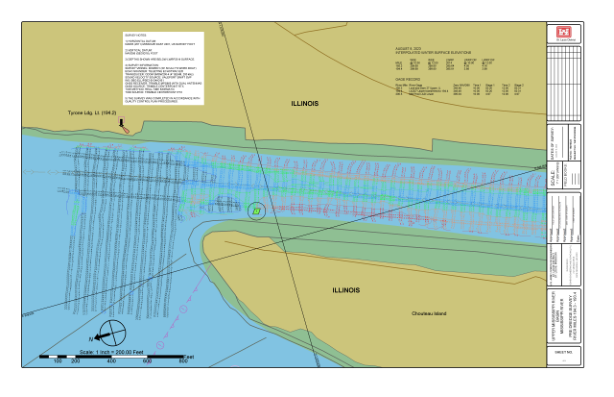
测量说明: - 1) 水平基准
2023 年 8 月 8 日 — 4) 调查信息:调查船:BOWEN1(24' SCULLY 工作船)。回声测深仪:TELEDYNE ECHOTRAC E20。换能器:ODOM SMSW200-4(4° 波束,200 kHz)。
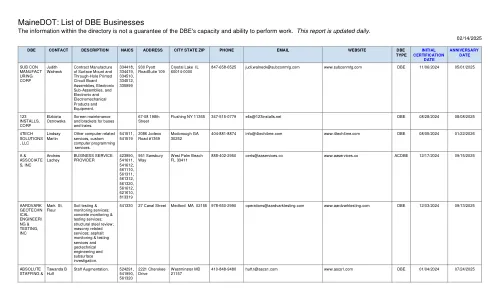
缅因州交通部:DBE 企业列表
Edward J. Odom, IV 建筑管理、电力和通信传输线、电缆拼接、电气或光纤、计算机和网络电缆安装、电子控制安装和服务、电子控制系统安装、光缆(传输线除外)安装、报刊经销商和报摊、新闻经销商、卫星电信经销商、计算机系统设计服务、计算机系统集成分析和设计服务、计算机系统集成

Guan,J.,Sagar,L。K.,Li,R.,Wang,D.,Bappi,G.,Wang,W。,…Odom,T。W.(2020)。具有受控极化模式的量子点 - 平面激光。
在过去的五年中,在多伦多大学学习一直是一种令人难以置信的特权。我有机会与出色的人合作并分享他们的经验,为此,我深表感谢。首先,我要感谢Seferos教授自2012年以来担任我的导师,当时我首先加入了他的小组,成为一名本科生。在您遵循的几年中,我从您的指导和建议中得到了巨大的收益。并不总是很容易浏览我们的不同研究方法,而是我学到的有关成为科学家,经理,导师的教训,最重要的是,学生是无价的。我不能非常感谢。第二,我要感谢我的委员会成员。Bender教授兼Walker教授毫不犹豫地指导和鼓励我从事的研究,他们的两个团体都是支持和援助的重要来源。当然,对于Seferos小组的每个成员来说,过去和现在都感谢您的一切。如果没有提供的帮助和支持,就不可能完成我的博士工作。

MCTP 关键观察 FY22 2 月 23 日公开 - 美国陆军
这些观察是由 MCTP 军官、士官和一级准尉与高素质专家高级导师 (HQE-SM) 共同进行的。我们要表彰以下 HQE-SM,他们通过洞察和培养高级领导者,继续为我们的军队做出贡献: LTG (R) 1 Jeffrey Buchanan, LTG (R) Claude Christianson, LTG (R) David Fridovich, LTG (R) David Hogg, LTG (R) Michael Lundy, LTG (R) David Valcourt, LTG (R) John Thomson, LTG (R) Terry Ferrell, MG (R) Jeffery Colt, MG (R) Edward Dorman, MG (R) Scott Zobrist, MG (R) Richard Longo, MG (R) Robert Walters, MG (R) Kurt Ryan, MG (R) Brian Winski, MG (R) Viet Luong, MG (R) James Kraft, BG (R) Paul Laughlin, BG (R) Mark Odom, BG (R) Burdett Thompson, BG (R) Louis Weber, BG (R)道格拉斯·麦克布莱德 (Douglas McBride)、准将 (右) 马克·斯宾德勒 (Mark Spindler) 和准将 (右) 克里斯托弗·斯皮尔曼 (Christopher Spillman)。战士们!
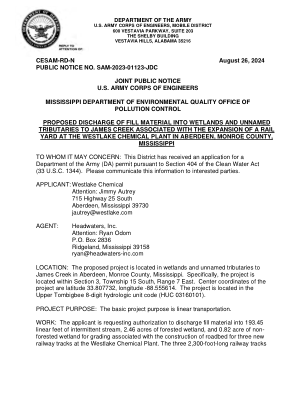
回复:CESAM-RD-N 2024 年 8 月 26 日公告号。 SAM-2023-01123-JDC 联合公告 美国陆军工程兵团 密西西比州环境质量部 污染控制办公室
拟将填料排放到湿地和詹姆斯溪的未命名支流中,与密西西比州门罗县阿伯丁市韦斯特莱克化工厂铁路场扩建有关 敬启者: 本区已收到根据《清洁水法》第 404 条 (33 U.S.C.1344) 申请陆军部 (DA) 许可的申请。请将此信息传达给相关方。申请人:Westlake Chemical 收件人:Jimmy Autrey 715 Highway 25 South Aberdeen, Mississippi 39730 jautrey@westlake.com 代理人:Headwaters, Inc.收件人:Ryan Odom P.O.Box 2836 Ridgeland, Mississippi 39158 ryan@headwaters-inc.com 位置:拟建项目位于密西西比州门罗县阿伯丁的湿地和詹姆斯溪的未命名支流中。具体来说,该项目位于第 3 区、第 15 乡镇南、第 7 区东。该项目的中心坐标为纬度 33.807732,经度 -88.555614。该项目位于上汤比格比 8 位水文单元代码 (HUC 03160101) 中。项目目的:项目的基本目的是线性运输。工作:申请人请求授权将填充材料排放到 193.45 英尺长的间歇性溪流、2.46 英亩的森林湿地和 0.82 英亩的非森林湿地中,以便为 Westlake 化工厂的三条新铁路轨道的路基建设进行平整。三条 2,300 英尺长的铁路轨道
心脏和血管重塑中的前列腺素
Skip Brass, MD, PhD Associate Dean and Director Rahul Kohli, MD, PhD Associate Director Elizabeth Bhoj, MD, PhD Steering Cmt Member Donita Brady, PhD Steering Cmt Member Horace DeLisser, MD Steering Cmt Member C. Jessica Dine, MD, MHSP Steering Cmt Member Robert Heuckeroth, MD, PhD Steering Cmt Member Audrey Odom John, MD, PhD Steering Cmt Member Max Kelz, MD, PhD Steering Cmt Member Erle Robertson, PhD Steering Cmt Member Mike Atchison, PhD Director, VMD-PhD program Bruce Freedman, VMD, PhD Steering Cmt Member, VMD-PhD program Nicola Mason, B Vet Med, PhD, DACVIM Steering Cmt VMD-PHD计划会员Michael May,博士指导CMT成员,VMD-PHD计划Jennifer Punt,VMD,博士学位指导CMT成员,VMD-PHD计划Susan Volk,VMD,VMD,博士学位CMT CMT CMT CMT,VMD-PHD计划MAGGIE KRALL PLAMEND MAGGIE KRALL MAGGIE KRALL MAGGIE MAGGIE KRALL MAGGIE JILL BAXI NADI NAWI NAWI nw.学位Carina Myers,MSED MD-PHD课程MS副总监Hope Charney,MA行政协调员David Bittner,MA协调员,MD-PHD计划Ameena Atif Atif协调员,VMD-PHD Program
2024 AAcNS 计划书 2024 年 9 月 20 日
Dean H. Echols 1938 - 39 斯彭斯·布雷登 1940 约瑟夫·P·埃文斯 1941 弗朗西斯·墨菲 1942 弗兰克·H·梅菲尔德 1943 A. 厄尔·沃克 1944 巴恩斯·伍德霍尔 1946 威廉·S·基思 1947 霍华德·A·布朗 1948 约翰·拉夫 1949 E. 哈利·博特雷尔 1950 华莱士·B·汉比 1951 亨利·G·施瓦茨 1952 J. 劳伦斯·普尔 1953 鲁珀特·B·雷尼 1954 戴维·L·里夫斯 1955 斯图尔特·N·罗 1956 亚瑟·R·埃尔维奇 1957 杰斯·D·赫尔曼 1958 埃德温·B·博尔德雷 1959 乔治·S·贝克 1960 C. 亨特·谢尔登 1961 - 62 塞缪尔R·斯诺德格拉斯 1963 西奥多·拉斯穆森 1964 埃德蒙·J·莫里西 1965 乔治·马尔特比 1966 盖·L·奥多姆 1967 詹姆斯·G·加尔布雷斯 1968 罗伯特·H·普登茨 1969 - 70 威廉·B·斯科维尔 1971 罗伯特·L·麦克劳林 1972 莱尔·A·弗伦奇 1973 本杰明·B·惠特科姆 1974 约翰·R·格林 1975 威廉·H·芬德尔 1976 威廉·H·斯威特 1977 亚瑟·A·沃德 1978 罗伯特·B·金 1979 埃本·亚历山大,Jr. 约瑟夫·兰索夫二世