机构名称:
¥ 1.0
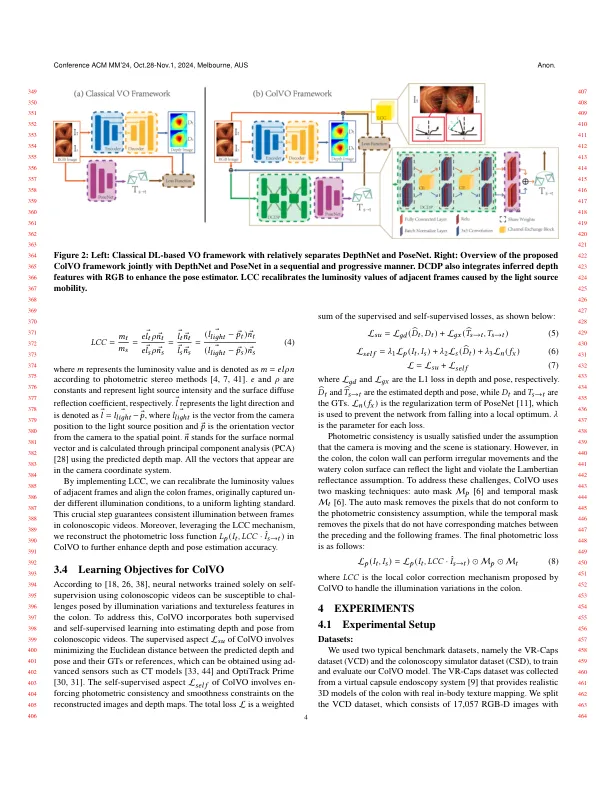
定位病变是结肠镜检查的主要目标。3D感知技术可以通过恢复结肠的3D空间信息来提高病变局部局部的准确性。但是,现有方法集中于单个帧的局部深度估计,并忽略了结肠镜的精确全局定位,因此未能提供病变的准确3D位置。此短缺的根本原因是双重的:首先,现有方法将结肠深度和结肠镜构成估计为独立任务,或将其设计为并行子任务分支。其次,结肠环境中的光源与结肠镜一起移动,从而导致连续框架图像之间的亮度波动。为了解决这两个问题,我们提出了一个新型的基于深度学习的视觉探针框架Colvo,它可以使用两个关键组成部分不断地估算结肠深度和结肠镜姿势:深度和姿势估计的深度策略(DCDP)和轻型一致的校准机制(LCC)。dcdp对夫妇融合和损失函数的利用对夫妇深度和构图估计模式的限制确保了连续帧之间几何投影的无缝比对。同时,LCC通过重新校准相邻帧的光度值来解释亮度变化,从而增强了Colvo的鲁棒性。对COLVO在结肠探测基准上进行的全面评估揭示了其在深度和姿势估计的最新方法上的承受能力。我们还展示了两个有价值的应用:肠道立即定位和完整的3D重建。Colvo的代码可从https://github.com/xxx/xxx获得。
COLVO:考虑几何和光度一致性
主要关键词



相关文件推荐