机构名称:
¥ 1.0
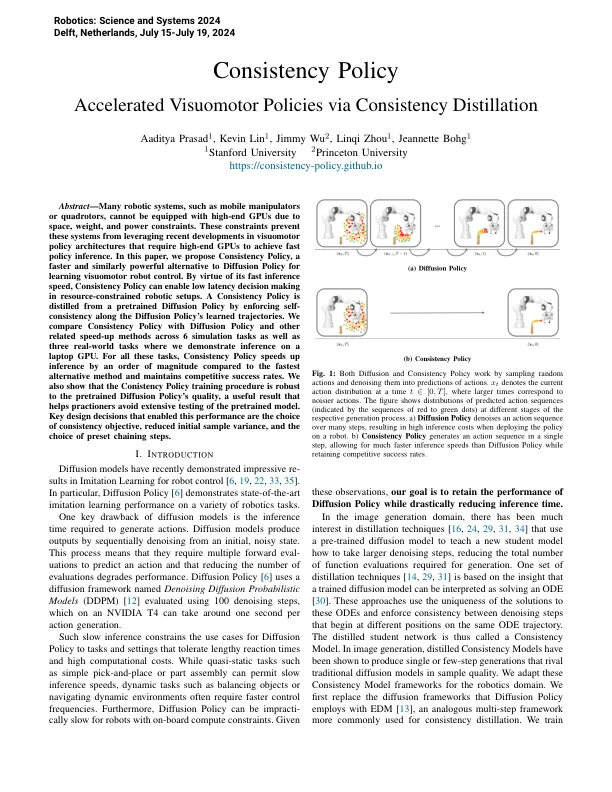
摘要 - 由于空间,重量和功率限制,许多机器人系统(例如移动操纵器或四型)无法配备高端GPU。这些约束阻止这些系统利用需要高端GPU才能实现快速政策推断的视觉运动策略的最新发展。在本文中,我们提出了一致性策略,这是学习视觉运动机器人控制的扩散策略的更快且相似的替代方案。凭借其快速推理速度,一致性策略可以在资源受限的机器人设置中实现低延迟决策。通过沿扩散策略的学习轨迹执行自我一致性,从预验证的扩散政策中提炼了一致性政策。我们将一致性策略与6个仿真任务中的扩散策略和其他相关的加速方法进行了比较,以及三个现实世界中的任务,我们在其中演示了笔记本电脑GPU的推断。对于所有这些任务,与最快的替代方法相比,一致性策略会加快推理的速度,并保持竞争性的成功率。我们还表明,统一政策培训程序对预处理的扩散政策的质量是可靠的,这是一个有用的结果,可帮助执业者避免对预审预周化的模型进行广泛的测试。启用此性能的关键设计决策是一致性目标的选择,减少初始样本差异以及预设链条步骤的选择。
一致性策略
主要关键词


相关文件推荐