XiaoMi-AI文件搜索系统
World File Search SystemPreset

飞机的几何形状和推进架构可视化未来飞机尺寸工具(快速)
未来的飞机尺寸工具(FAST)是密歇根大学为早期概念飞机设计开发的基于MATLAB的开源软件。快速通过新颖的推进系统来促进传统和高级飞机配置的设计和分析,从而基于特定要求,所需的技术目标以及系统级别的目标来实现初步尺寸和性能评估。它已被用于NASA的电气化飞机推进和电气化动力总成飞行演示项目,以评估新型飞机概念,包括电气化商用货轮(notionility lockheed Martin LM-100J)和NASA的亚音速单单船尾发动机配置。本文介绍了快速的可视化软件包的开发,从而满足了整个尺寸过程中飞机设计的视觉表示的需求。集成的软件包提供了飞机外模线和推进架构的示意图的可视化。用户可以创建自定义的飞机几何形状或使用快速可用的预设。此外,随着飞机尺寸的过程的进行,可视化软件包会动态更新飞机的形状和尺寸,从而通过使设计师能够在早期设计阶段有效地可视化和完善其飞机概念来快速增强飞机。
宽带顺序负载调制平衡...
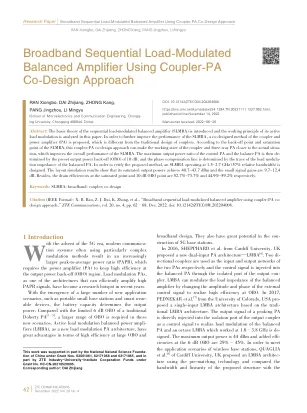
摘要:介绍了顺序负载调制平衡放大器(SLMBA)的基本理论,分析了其有源负载调制的工作原理。为了进一步提高SLMBA的性能,提出了一种有别于传统耦合器设计的耦合器与功率放大器(PA)联合设计的方法。该耦合器-PA联合设计方法根据SLMBA的回退点和饱和点,可以使耦合器和三通PA的工作状态更接近实际情况,提高了SLMBA的整体性能。然后通过预设的输出功率回退(OBO)10 dB确定控制PA与平衡PA的最大输出功率比,通过平衡PA的负载调制阻抗走线确定相位补偿线。为了验证所提方法,设计了工作在1.5~2.7 GHz(57%相对带宽)的SLMBA。版图仿真结果表明该器件饱和输出功率达到40.7~43.7 dBm,小信号增益为9.7~12.4 dB,饱和点和10 dB OBO点的漏极效率分别为52.7%~73.7%和44.9%~59.2%。

记忆游戏对学业的有效性...
近年来,教育游戏化成为人们关注的焦点。“游戏化是在非游戏活动中使用游戏设计元素、游戏机制和游戏思维来激励参与者的做法”。教育游戏化是一种教学方法,要求学习者按照预先设定的规则参加比赛。过去几年来,它已成为教育工作者在教学中使用的跨学科和流行工具。本研究的目的是找出记忆游戏对小学生学业成绩的有效性。本研究采用实验方法。样本总数为80名四年级学生。对照组40名学生,实验组40名学生。使用适当的工具收集数据,并通过t'检验进行分析。结果发现实验组学生的学业成绩高于对照组学生。实验组的后测结果比对照组好得多,表明游戏对提高小学阶段的成绩和创造互动环境有很好的作用。建议使用游戏,因为它们非常有效,特别是对于教学的初级阶段,并且游戏作为一种学科习得的过程对教师有帮助。

标题:基于小波的变分近似功能磁共振成像中的脑活动联合检测-估计
自从首次报道人类的血氧水平依赖性 (BOLD) 效应 (Ogawa 等人,1990) 以来,功能性磁共振成像 (fMRI) 就成为一种强有力的工具,可以非侵入性地研究感觉运动或认知任务与间接反映诱发神经活动的血流动力学 BOLD 反应之间的关系。fMRI 使我们能够确定当人类受试者受到特定刺激时哪些皮质区域会引起激活。fMRI 的主要目标之一是通过探索接受相同实验范式的一组受试者 (通常约 15 个) 来显示共同认知功能的存在。组级分析很大程度上依赖于公平的受试者内统计分析。后者传统上是使用基于实验设计矩阵的一般线性模型 (GLM) 进行的,该矩阵指定了对每个刺激的预期 BOLD 响应。这种 GLM 还假定了所谓的血流动力学响应函数 (HRF) 的预设形式。然而,将后者函数固定为某种规范形状似乎过于严格且具有误导性。事实上,正如各种实验所证明的那样,HRF 可能因受试者而异,甚至可能因给定受试者大脑皮层区域而异。

Accusense收费系列全部/关闭板...
在整个手册中,寻找此符号。这意味着要保持警惕 - 您的安全涉及。如果您不遵循这些安全说明,则可能会造成人身伤害或财产损失。1。功能•全自动 - 启动并停止自动充电•5 l.e.d.显示以轻松解释充电和/或充电误差条件•许多安全功能,包括反向电池保护和错误的电池连接•充电算法控制电压和电流,用于精确充电•基于微处理器的控制将实现智能充电•完成电荷后,充电器将在充分电池中保持电池电量,以全额充电2。引言国际多元化电力(DPI)电池充电器旨在为深循环,铅酸电池充电。是出厂预设,以4种不同的充电模式之一进行操作;有关更多详细信息,请参阅第6节。模式选择跳线字段,在充电器的正面,允许用户更改模式设置以选择其他电池组。注意 - 不正确的模式设置可能会导致电池组或财产损坏永久损坏。有关正确的设置,请参阅第6节。其简单的操作方法和无故障的性能使其具有吸引力。操作,充电器连接到交流电源后,

机器人最终效应器的关键技术的设计
摘要:随着自动化和情报行业的快速发展,机器人最终效应器的性能直接影响机器人系统的运行效率和应用范围,因此其研究和优化尤为重要。这项研究首先通过系统分析在不同的应用程序场景中确定了现有机器人最终效应器设计的性能瓶颈和局限性。然后,使用模块化设计方法开发了一种新型的执行器原型,并结合了最新的材料科学研究和机电一体化整合技术。在实验验证阶段,通过比较和测试新设计和旧执行器在关键绩效指标(例如精度,响应速度和负载能力)中的性能来确认新设计的有效性。平均偏差通常很低,大部分在0.05至0.09毫米之间,表明执行器可以在大多数情况下准确地定位预设目标位置。这项研究的价值在于,提出的最终效应器设计方案不仅改善了机器人的运营性能,而且具有良好的普遍性和适应性,为机器人技术的未来开发奠定了坚实的基础。这些成就有望大大促进机器人技术在制造,医疗保健和服务等行业中的广泛应用,并提高整个行业的自动化水平。

Dynapar - Dominion 工业
简介 ................................................................................................... 3.00 产品选择指南 ................................................................................ 3.02 机械式总计计数器 1490 系列可变计数器 ........................................................................ 3.04 7623 系列手动计数器 ........................................................................ 3.05 7458-7461 系列,小型方形外壳 ........................................................ 3.06 7268 系列高速、非复位 ........................................................................ 3.07 7272、7287 系列小型、可复位、棘轮或旋转驱动 ............................................................................. 3.08 1259、1261、1262 系列通用 ........................................................................ 3.09 7030 系列气动通用 ........................................................................ 3.10 7428、7430 系列中型 ........................................................................ 3.11 1133、1134 系列高速可复位 ................................. 3.12 1667、1669 系列可见度计数器 .............................................. 3.13 7298 系列高速、快速复位 .............................................. 3.14 1129 系列大数字 .............................................................. 3.15 1953 系列线性测量可见度计数器- LM ............................. 3.16 7434 系列线性测量、蜗杆传动 ............................................. 3.17 机械计数器的测量轮 ............................................................. 3.18 电动累计计数器 1205 系列通用 ............................................................. 3.19 7443 系列通用 ............................................................. 3.20 7790、7791 系列微型低成本 ............................................. 3.21 7437、7438 系列低成本非复位、复位 ............................................. 3.22 机械预定计数器 1239 系列高速 ...................................................................... 3.23 7283 系列高速 ...................................................................... 3.24 电动预定计数器 7441 系列电动预置 ...................................................................... 3.25 HZ170 ............................................................................................. 3.26

使用可调参数的纳米孔测序信号数据
是一种在基因组学领域中广泛使用的技术。但是,目前缺乏从纳米孔测序设备创建模拟数据的有效工具,这些工具以时间序列的当前信号数据的形式测量DNA或RNA分子。在这里,我们介绍了Squigulator,这是一个快速而简单的工具,用于模拟逼真的纳米孔信号数据。s弹器采用参考基因组,转录组或读取序列,并生成相应的原始纳米孔信号数据。这与牛津纳米孔技术(ONT)和其他第三方工具的基本软件兼容,从而为纳米孔分析工作流的每个阶段提供了有用的基板,用于开发,测试,调试,验证和优化。用户可以使用模拟特定ONT协议或无噪声“理想”数据的预设参数生成数据,或者他们可以确定性地修改一系列实验变量和/或噪声参数以满足其需求。我们提供了一个简短的用途示例,创建了模拟数据,以模拟不同参数影响ONT基本和下游变体检测准确性的程度。此分析揭示了对ONT数据和基本算法的性质的新见解。我们为纳米孔社区提供了旋转器作为开源工具。
气候变化的影响和适应纽芬兰
o港口aux basques O Codroy Valley o Pasadena总共有78人注册了该系列,个人研讨会为5至16名参与者。在研讨会注册过程中,邀请参与者从预定的列表2中选择多达五个主题,以表明他们认为对其地区最相关和重要的内容。在某些研讨会中,参与者选择与获得最多选票的主题合作。在其他研讨会中,参与者选择将获得更多选票的人组成类似的话题。在对预测NL,Climatlantic和相关技术援助工具和资源的简短演讲之后,邀请了研讨会参与者通过小组讨论来描述关键的区域气候变化问题和关注点,突出了与气候变化相关的社区中已经完成的事情,并可以有效地确定该地区的气候变化影响,以确定该地区的影响。鉴于每个社区对气候变化影响的不同背景和经验,每个讨论的进行方式都不同。,研讨会的主持人不是遵守预设议程,而是支持参与者以他们对他们的需求和利益最相关的方向进行对话:

基于 Fisher-... 的量子图像加密算法
量子计算的并行计算能力和量子比特的特殊性质为图像处理任务提供了有效的解决方案。本文提出了一种基于Fisher-Yates算法和Logistic映射的量子图像加密算法。首先利用Fisher-Yates算法生成三个密钥序列,其中一个密钥序列用于对图像的坐标量子比特进行编码。利用另外两个密钥和预设规则,基于编码后的坐标量子比特设计量子坐标置乱操作,对明文图像的空间信息进行有效的置乱。接下来,生成另一组密钥序列,其中一个密钥序列用于对图像的颜色量子比特进行编码。利用另外两个密钥序列和不同的规则,设计了一种基于编码颜色量子比特的量子比特平面置乱操作,成功对图像的颜色信息进行了置乱。最后基于Logistic映射生成量子密钥图像,并基于Fisher-Yates算法对密钥图像进行置乱,以提高密钥复杂度。将原图像与置乱后的密钥图像进行异或运算,得到最终的密文图像。给出了该方案的完整量子电路图。实验结果和安全分析证明了该方案的有效性,该方案提供了很大的密钥空间,计算复杂度仅为O(n)。