XiaoMi-AI文件搜索系统
World File Search SystemROV

城市的地球科学文章:交付欧洲的可持续城市未来
1环境科学中心,英国地质调查局,Keyworth NG12 5GG,英国2捷克地质调查局,KLáROV131/3,118-21 Prague,捷克共和国; Jan.jelenek@geology.cz 3丹麦和格陵兰的地质调查局,DK-1350,丹麦哥本哈根; pke@geus.dk 4意大利意大利环境保护与研究研究所,意大利地质调查局,通过意大利罗马罗马市60-00144的Vitaliano Brancati; francesco.lavigna@isprambiente.it 5爱尔兰地质调查局,Booterstown Hall,Booterstown,Booterstown,Blackrock,A94 N2R6 Dublin,Dublin; sophie.oconnor@gsi.ie 6波兰地质研究所-National Institute Institute,4,波兰00-975 Rakowiecka Street,波兰; gryz@pgi.gov.pl 7 Lyell Center,英国地质调查局,爱丁堡EH14 4AP,英国; msmi@bgs.ac.uk 8荷兰地质调查局,荷兰普林斯顿州6,3584 CB UTRECHT; jeroen.schokker@tno.nl 9地球科学系,科学系,Vrije Universiteit Amsterdam,de Boelelaan 1085,1081 HV Amsterdam,荷兰10挪威地质调查局,挪威地质调查局,P.B。6315 Torgarden,7491 Trondheim,挪威; guri.venvik@ngu.no *通信:step@bgs.ac.uk

自动水下车辆的控制系统的设计Edysys1
摘要。本文描述了自动水下车辆的控制系统的设计Edysys1。与远程操作的车辆(ROV)相比,一辆无人驾驶的水下车辆是一种无人驾驶的且自行的水下船只,可以独立运行,并执行几项分配给它的任务,该任务通常被束缚在船上或其他系泊的水车上。自主水下车辆的控制系统的智能设计是一个积极的研究领域,赋予对自治的需求和智能系统满足此类需求的能力。一个控制系统是用Raspberry Pi 4计算机设计为主控制单元的。通过车辆采集数据采集的各种子系统和传感器由Raspberry Pi 4控制,该覆盆子PI 4具有配置的机器人操作系统(ROS)。使用Python编程语言配置控制每个传感器的必要智能。此后,相关的python脚本在ROS框架中作为节点实现。通过调用ROS中的相关节点,通过ROS环境中的设计系统获得了各种感觉数据值。还实现了通过洛拉的成功沟通。
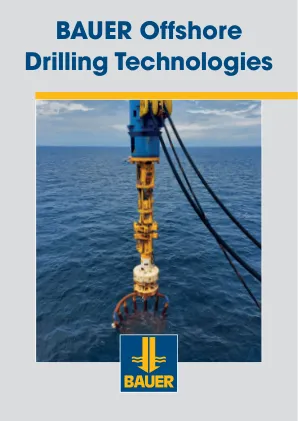
宝华海上钻井技术
BAUER BSD 3000 是一种反循环钻井系统,配备全断面加重牙轮钻头钻头。钻机由船上起重机下水并定位在海床上,放入预先安装好的海底模板中。远程控制通过位于甲板上的 Bauer 模块化控制舱进行。所有钻井功能以及桩安装/灌浆的监控/定位都是远程执行的,电源和信号通过柔性脐带缆连接,方式与 ROV 相同。随后的钻井弃土和岩屑通过空运运送到海床。当能见度较差时,所有主要功能都通过摄像头和近距离传感器进行监控。钻井设备和脐带缆经过特殊设计,可承受异常海床流和表面波造成的巨大力量和疲劳。脐带处理系统必须补偿即使是最强大的 DP 船舶也不可避免的运动,还必须确保在紧急情况下所有脐带都能安全拆卸,所有软管都具有故障安全关闭功能。钻井模板的所有关键部件均由 Bauer 设计、制造和测试。

高可靠性管理,控制运营商风险……
摘要:本文的目的是分析自主海洋系统运行中的主要实时风险,这些风险来自不同的自主性水平 (LoA)。高可靠性管理 (HRM) 是一种成熟的框架,用于评估复杂基础设施中实时操作员的表现。在本文中,该框架应用于代表不同用途和自主性水平的两种情况:一种是专注于遥控机器人 (ROV) 和海底干预的海洋水下机器人,另一种是解决带有动态定位 (DP) 系统的复杂海洋水面舰艇的操作。通常,自主系统与无人系统相关联,但一些载人系统(例如,具有复杂自动化和 DP 系统的船舶)具有可以被描述为自主的特定控制功能。本文重点介绍具有不同自主性水平和重大危险潜力的有人和无人系统。最重要的研究结果是确定了跨两个或三个 LoA 的多种不同运营状态,每种运营状态都有明显不同的风险需要实时管理。HRM 框架的应用凸显了在开发下一代自主海洋系统时实现可靠的操作员控制和在线风险管理的重要性。
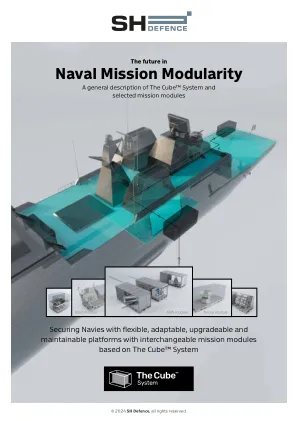
海军任务模块化
•反对马林战(ASW)(拖曳的身体传感器,自动驾驶汽车和ASW鱼雷管)•卸货索雷诱饵•矿山柜台(MCM)(MCM)(自动驾驶汽车和对潜水手术的支持,对固定空气供应的潜水操作) Warfare (ASuW) (advanced missile systems such as the RBS15 from SAAB to be accommodated in our containers/modules) • Humanitarian Assistance and Disaster Relief (HADR) (advanced medical facilities, reverse osmosis water treatment plant and electrical generation plant can be accommodated in our modules) • Special Forces (SF) support (SF mission planning and Command and Control capability can be securely accommodated in our modules) • Maritime Interdiction Operations (MIO) and Resource and Border Protection Operations (RBPO) (the Cube system can provide stowage and launch and recovery systems for additional boats in addition to modular accommodation for boarding parties and other government agency staff) • Sea Mine Laying module that consists of a container-based minelaying module and one or more storage modules • Research Support modules for for inspection, surveillance and repair of subsea installations • Launch and Recovery module for ROV´s,无人机(UAV),USV,AUV,UUV和MINI-SUBS
NAE-2020-00958.pdf
宣布召开公众会议并征求公众意见 地区工程师已收到 Jennifer Flood 的许可申请,允许在美国水域、通航水域和外大陆架进行工作,申请来自 SouthCoast Wind Energy(前身为 Mayflower Wind Energy, LLC),地址为 101 Federal Street, Suite 1900, Boston, MA 02110。拟议工作的大部分将位于大西洋海洋能源管理局 (BOEM) 可再生能源租赁区 OCS-A 0521,该区域面积约为 127,388 英亩,位于马萨诸塞州玛莎葡萄园岛以南 26 海里 (nm) 处,马萨诸塞州楠塔基特岛以南约 20 海里处。租赁区域外的作业还将在大西洋、萨康奈特河、芒特霍普湾、马斯基盖特海峡和法尔茅斯港水域内进行。总体提案涉及 SouthCoast 风电场(原 Mayflower Wind)的建设、维护和最终退役,以及相关的海上和陆上输出电缆和陆上变电站作业。SouthCoast 风电场将包括租赁区域内的多达 149 个位置,将由多达 147 个风力涡轮发电机 (WTG) 和多达五个海上变电站平台 (OSP) 占用,这些平台由阵列间电缆 (IAC) 网络连接。这 149 个位置将符合 1.0 nm x 1.0 nm 的网格布局,方向为东西和南北。SouthCoast Wind 正在考虑四种类型的固定子结构来支撑 WTG 和 OSP:单桩、桩式护套、吸力桶护套和重力式结构 (GBS)。每个子结构可能都需要防冲刷保护,正在考虑的选项包括岩石、混凝土垫、沙袋、人工海藻/礁石/叶垫或自展开伞系统(通常用于吸力桶护套)。阵列间电缆系统将通过一系列海底电缆将 WTG 连接到 OSP。这些电缆的直径范围为 5 英寸至 8 英寸,埋深范围为 3.2 英尺至 8.2 英尺,目标深度为基底以下 6 英尺。正在考虑的安装方法包括使用喷射式 ROV、预切犁、机械犁和/或机械切割 ROV 系统。在无法埋设的区域、由于海床条件而无法达到足够埋设深度的区域或由于电缆与其他电缆或管道交叉而需要保护的区域,将安装硬铠装形式的电缆保护。根据 2019 年和 2020 年完成的调查对现场条件的初步了解,SouthCoast Wind 估计 10% 的阵列间电缆也需要电缆保护。这些二次电缆保护方法可能包括建造岩石护堤、放置混凝土垫层、放置岩石和/或使用叶状垫层。
抑制剂醛固酮素酶BI 690517增强u ...
最近发表的研究表明,可以通过添加钠 - 葡萄糖kotransporter 2(SGLT2)以及非类固醇矿体矿物质型 - 甲状腺粒 - 甲状腺胶质体拮抗剂拮抗剂,可以进一步增强肾素 - 英语(RAS)抑制剂(RAS)抑制剂(RAS)抑制剂十烯。同时增加血浆肾素活性的血清醛固酮的价值发生在大约20%的耐药性高血压患者中,其中15%的轻度至中度高血压患者中有15%,但约10%的健康患者也会发生。1催化醛固酮在“必需”高血压的发病机理中也起着重要作用,并且常常无法诊断。慢性肾脏疾病(CKD)患者的醛固酮合成增加可加速肾功能不全的进展。醛固酮通过刺激炎症和纤维化而切换到肾小球硬化,肾小管间质纤维化和血管肾硬化。2
VRYHOF 手册
安放锚 74 收回锚 76 锚定位 77 铺设 Stevpris 锚 77 禁止做什么! 79 拉起 Stevpris 80 从锚架上展开 Stevpris 80 在深水中登锚 81 锚爪中的压载物 82 追逐者平衡 83 永久系泊的展开 84 背载 85 简介 85 背载方法 86 涉及铰接锚的背载 86 使用两个 Stevpris 锚进行背载 87 使用追逐者进行背载 88 Stevmanta VLA 安装 89 简介 89 单线安装程序 89 安装程序 90 Stevmanta 回收 91 双线安装程序 92 Stevmanta 回收 93 使用 Stevtensioner 的单线安装程序 94 使用 Stevtensioner 的双线安装程序 97 Stevtensioner 101 简介 101 张紧器的工作原理 101 施加张力的测量103 脐带缆和测量销 104 脐带缆 104 ROV 连接 104 声学数据传输 104 本地存储和数据显示 105 预应力锚杆和桩的拉伸持续时间 105 操作 Stevtensioner 106 Stevtensioner 产品范围 107 Stevtensioning 模式 108 交叉张紧 108 反作用锚的张紧 108 3 向张紧 108 所需安装船 109

探索生物降解效率:对主要微型降解细菌的系统评价
微塑料(MPS)由于在不同的环境室(包括大气,水生和陆地)的不同环境室中的出现而被视为新兴污染物。它们被定义为塑料颗粒的大小从1 µm到5 mm,并且在各种类型,尺寸,形状以及一级和次级聚合物组成中都有发现(Miri等,2022; Thakur等,2023)。微塑料(MPS)由于其持续性和生物蓄积而被认为对野生动植物和人类有害。这归因于在制造过程中添加各种物质,例如色素,增塑剂和粉状阻燃剂。此外,由于它们的化学物理特性,它们具有很高的耐用性,需要在环境中延长降解(Cai等,2023; Niu等,2023)。因此,自1950年代以来,该行业的塑料生产一直在进行,年产量达到约200万吨,因此2015年的产量显着增加到每年3.8亿吨。结果,从1950年到2015年,生产了大约78亿吨塑料,从而产生了约63亿吨的废物。在过去的70年中,全球塑料产量已从150万吨增加到约3.59亿吨,估计预测到2025年达到5000万吨。由于微塑料越来越污染环境,食物链也受到了显着影响。这些颗粒已直接或通过营养转移进入食物链。这一趋势引起了民间社会内部的显着关注,因为国会议员主要是通过较大的聚合物降解而产生的,这一过程受到物理,化学或生物学因素的影响(Cverenkárová等,2021; Torena et al。,Torena等,2021; 2021; Villalobos et al。,20222; 2022; 2022; OSMAN et al al al an a al et a al a al et a al et a al a al,2022; osman et al。塑料污染发生在无脊椎动物中,例如多齿,51种甲壳类动物,棘皮动物,双壳类和脊椎动物,包括鱼,海鸟和哺乳动物。的确,微型污染引起的主要关注点之一是其在消化道中的生物蓄积效应(Cverenkárová等,2021)。微塑料(MPS)由于管理和倾销做法不佳而通过各种途径进入环境。但是,可以采用一些机制来控制它们在环境中的存在,例如生物,热和光催化降解。生物降解是通过使用不同类型的微生物而发生的,因为有些人有可能在生物修复过程中使用(Park and Kim,2019)。这些微生物在自然界中广泛分布,由于细菌的快速繁殖,多样化的营养能力,强大的适应能力以及降解MPS的显着潜力。它们在自然环境中降解的MPS,例如聚乙烯二甲酸酯(PET),聚乙烯(PE)和聚丙烯(PP)(Yuan等,2020; Li等,2022)。因此,当存在于尽管聚合物具有相对简单的化学结构,但它们以其对生物降解的高抗性而闻名,尤其是由于它们的疏水结构,高分子量和缺乏有利的功能组。
VRYHOF 手册
安放锚 74 收回锚 76 锚定位 77 铺设 Stevpris 锚 77 禁止做什么!79 架设 Stevpris 80 从锚架部署 Stevpris 80 在深水中登锚 81 锚爪中的压舱物 82 追逐者平衡 83 永久系泊的部署 84 背载 85 简介 85 背载方法 86 涉及铰链锚的背载 86 使用两个 Stevpris 锚进行背载 87 使用追逐者进行背载 88 Stevmanta VLA 安装 89 简介 89 单线安装程序 89 安装程序 90 Stevmanta 回收 91 双线安装程序 92 Stevmanta 回收 93 使用 Stevtensioner 的单线安装程序 94 使用 Stevtensioner 的双线安装程序 97 Stevtensioner 101 简介 101 张紧器的工作原理 101 测量施加张力 103 脐带缆和测量销 104 脐带缆 104 ROV 连接 104 声学数据传输 104 本地存储和数据显示 105 预应力锚索和桩的持续时间 105 操作 Stevtensioner 106 Stevtensioner 产品范围 107 Stevtensioning 模式 108 交叉张紧 108 反作用锚索张紧 108 3 向张紧 108 所需安装船 109