XiaoMi-AI文件搜索系统
World File Search SystemSPI
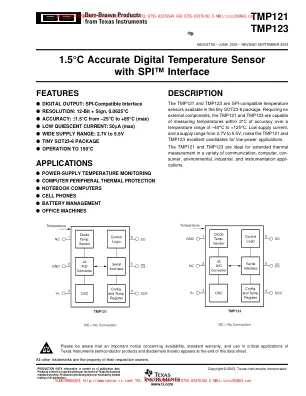
TMP121、TMP123:带 SPIŽ 接口的 1.5°C 精度数字温度传感器(R ev. B)
当 CS 为高电平时,TMP121 和 TMP123 会持续将温度转换为数字数据。CS 必须保持高电平至少一个转换时间(最大 320ms)才能更新温度数据。通过将 CS 拉低来启动从 TMP121 和 TMP123 读取温度数据,这将导致任何正在进行的转换终止,并使设备进入模拟关断状态。在模拟关断期间,静态电流降低至 1 µA。一旦 CS 被拉低,在 CS 下降之前来自上次完成的转换的温度数据将被锁存到移位寄存器中,并在 SCK 下降沿的 SO 上输出。16 位数据字首先输出符号位,然后是 MSB。在升高 CS 之前可以读取 16 位字的任何部分。TMP121 和 TMP123 通常需要 0.25 秒才能完成一次转换,在此期间消耗 50 µ A 电流。如果 CS 保持高电平的时间超过一个转换时间周期,则 TMP121 和 TMP123 将进入空闲模式 0.25 秒,仅需要 20 µ A 电流。每 0.5 秒开始一次新转换。图 2 描述了 TMP121 和 TMP123 的转换时序。
TMP121、TMP123:具有 SPIŽ 接口的 1.5°C 精度数字温度传感器 (R ev. B)
当 CS 为高电平时,TMP121 和 TMP123 会持续将温度转换为数字数据。CS 必须保持高电平至少一个转换时间(最大 320ms)才能更新温度数据。从 TMP121 和 TMP123 读取温度数据时,需要将 CS 拉低,这将导致任何正在进行的转换终止,并使器件进入模拟关断状态。在模拟关断期间,静态电流降至 1µA。一旦 CS 被拉低,在 CS 下降之前最后一次完成的转换的温度数据将被锁存到移位寄存器中,并在 SCK 下降沿的 SO 上输出。16 位数据字首先输出符号位,然后是 MSB。在提高 CS 之前可以读取 16 位字的任何部分。TMP121 和 TMP123 通常需要 0.25 秒才能完成转换,在此期间消耗 50µA 电流。如果 CS 保持高电平的时间超过一个转换时间周期,则 TMP121 和 TMP123 将进入空闲模式 0.25 秒,仅需 20 µA 电流。每 0.5 秒开始一次新转换。图 2 描述了 TMP121 和 TMP123 的转换时序。
TMP121、TMP123:带 SPIŽ 接口的 1.5°C 精度数字温度传感器(R ev. B)
当 CS 为高电平时,TMP121 和 TMP123 会持续将温度转换为数字数据。CS 必须保持高电平至少一个转换时间(最大 320ms)才能更新温度数据。通过将 CS 拉低来启动从 TMP121 和 TMP123 读取温度数据,这将导致任何正在进行的转换终止,并使设备进入模拟关断状态。在模拟关断期间,静态电流降低至 1 µA。一旦 CS 被拉低,在 CS 下降之前来自上次完成的转换的温度数据将被锁存到移位寄存器中,并在 SCK 下降沿的 SO 上输出。16 位数据字首先输出符号位,然后是 MSB。在升高 CS 之前可以读取 16 位字的任何部分。TMP121 和 TMP123 通常需要 0.25 秒才能完成一次转换,在此期间消耗 50 µ A 电流。如果 CS 保持高电平的时间超过一个转换时间周期,则 TMP121 和 TMP123 将进入空闲模式 0.25 秒,仅需要 20 µ A 电流。每 0.5 秒开始一次新转换。图 2 描述了 TMP121 和 TMP123 的转换时序。
微步进 MForce MicroDrive 产品手册
图 2.1.1:MForce MicroDrive 安装建议 ......................................................................3 图 2.1.2:微步进 MForce MicroDrive 电源连接 ..............................................................4 图 2.2.1:隔离逻辑引脚和连接 ......................................................................................5 图 2.2.2:输入时钟功能 ......................................................................................................6 图 2.2.3:时钟输入时序特性 .............................................................................................7 图 2.2.4:光耦合器输入电路图 .............................................................................................8 图 2.2.5:开路集电极接口示例 .............................................................................................9 图 2.2.6:开关接口示例 .............................................................................................................10 图 2.2.7:所需的最小连接 ................................................................................................11 图 2.3.1:MD-CC300-000 参数设置电缆 .............................................................................12 图 2.3.2:SPI 引脚和连接,10 针IDC.................................................................13 图 2.3.3:SPI 引脚和连接,12 针导线压接..............................................................13 图 2.3.4:具有单个微步进的 SPI 主控
海地 - 每月气候和天气
标准化降水指数(SPI)用于表征气象干旱。SPI将特定时间段内的降水与同期的气候进行比较。因此,可以将SPI值视为观察到的异常偏离气候的标准偏差数量。1个月的SPI值是每月降水异常以及土壤水分和植被健康的良好表示。3个月的SPI值是季节性降水异常的良好表示。标准化降水蒸散指数(SPEI)与SPI相似,但也考虑了蒸散量(因此温度对水需求的影响)。

围手术期疼痛的手术容积指数监测......
手术容积指数(SPI)监测是一种具有代表性的客观痛觉监测设备,利用光电容积描记信号测量痛觉。它易于应用于患者,数值计算公式直观易懂,因此临床解释简单。多项研究已证实了它的有效性和实用性。与血流动力学参数相比,SPI可以更准确地检测全身麻醉下手术中的痛觉程度,因此可以为各种阿片类药物(包括瑞芬太尼、芬太尼和舒芬太尼)的给药提供更好的指导。事实上,与传统镇痛相比,SPI引导的镇痛与术中阿片类药物消耗量较低、患者恢复较快、术后疼痛水平和不良事件发生率相当或较低有关。此外,SPI监测可以通过患者唤醒前的SPI值来预测术后疼痛程度和镇痛药物需求。然而,由于患者年龄、有效循环血容量、体位、合并用药和麻醉方案以及意识水平可能是 SPI 监测的混杂因素,因此临床医生在解释 SPI 值时必须小心谨慎。此外,由于 SPI 值可能因麻醉和镇痛方案以及潜在疾病而异,因此了解这些变量的影响并了解 SPI 监测相对于其他痛觉监测设备的优势和劣势至关重要。因此,本综述旨在帮助临床医生进行最佳的 SPI 指导镇痛,并通过阐明 SPI 监测在围手术期疼痛管理中的当前实用性和局限性来协助建立未来的研究设计。
![arxiv:2410.00578V1 [CS.SE] 2024年10月1日](/simg/9\9f1e52cda70cfd898deff765a5f1481089fccf46.webp)
arxiv:2410.00578V1 [CS.SE] 2024年10月1日
抽象高度自动化的驾驶功能由于其高复杂性和动态环境而对安全保证构成了挑战。UL 4600是自动产品的安全标准,要求使用安全性能指标(SPI)在确定违规时通过监视和采取措施的安全案件的有效性不断确保安全案件的有效性。尽管标准和伴侣文献中提供了许多混凝土SPI的例子,但它们对实现安全性的贡献理由通常是隐含的。在本文中,我们将最初的工作介绍了使用SPI的参数模式,以确保整个系统的整个生命周期中安全案例的有效性。我们的目的是使使用SPI的隐含论点明确,并基于此,以分析可能破坏对所选SPI集的信心的情况。为了维持SPI的有效性,我们提出了一种通过使用Meta-SPI不断监视其预期性能的方法。

DWM3000EVB
DWM3000EVB可以连接到大多数Nordic NRF5开发板。DWS3000示例最初是为NRF52840-DK设计的,并在MCU本机USB端口上使用USB-CDC。3.5.1北欧微控制器的SPI速度DWM3000模块支持38 MHz SPI总线时钟。SPI的速度对于某些应用中的时间可能至关重要。北欧NRF52系列微控制器的最大SPI速度从8到32 MHz不等。NRF52840-DK支持32 MHz SPI时钟速度,但是该开发板布局到Arduino扩展的长度SPI接线需要高驱动器水平以确保正确的操作。3.5.2将DWM3000EVB安装在NRF52840-DK上,在北欧NRF52840-DK上安装,在将任何Arduino型扩展安装到开发板上时,应注意。NRF52840-DK上的中间标头高于Arduino扩展连接器。由于董事会之间接触的距离或风险,如果需要,可以修剪中间头。否则,可以使用额外的女性扩展连接器来抬起盾牌。
在DIII-D上的低和高能量等离子体中粉碎的颗粒穿透
抽象破碎的颗粒注射(SPI)已被用作ITER的基线减轻缓解系统,因为从SPI的辐射有效载荷穿透到DIII-D等离子体中比使用大量气体注入(MGI)方法优越。由于ITER等离子体的能量含量和当前实验的能量含量存在很大差异,因此需要针对当前实验的可靠3D MHD建模来投射到ITER等离子体上。为了支持这些需求,通过将SPI注射到两个具有截然不同的能量含量和基座高度的放电中,研究了DIII-D等离子体中SPI片段渗透的深度。400托尔 - 纯ne碎片颗粒被注入0.2 MJ L模式放电和2 MJ超级H模式放电中。结果表明,在DIII-D中,SPI片段深入到低能等离子体中。随着血浆能量含量的增加,SPI碎片渗透降低,一些放电表现出局限于血浆外部区域的渗透。注入的SPI片段也分布在约20厘米的距离上,从而导致一些片段在热淬灭结束后或之后到达。

EN25QX256A (2S)
写保护 (WP#) 写保护 (WP#) 引脚可用于防止写入状态寄存器。与状态寄存器的块保护 (CMP、TB、BP3、BP2、BP1 和 BP0) 位以及状态寄存器保护 (SRP) 位一起使用,可以对部分或整个内存阵列进行硬件保护。WP# 功能仅适用于标准 SPI 和双 SPI 操作,在四路 SPI 期间,此引脚为四路 I/O 操作的串行数据 IO (DQ 2)。保持 (HOLD#) HOLD# 引脚允许在设备被主动选择时暂停设备。当 QE=0(默认)和 HRSW=0(默认)时,HOLD# 引脚启用。当 HOLD# 被拉低时,CS# 为低,DO 引脚将处于高阻抗状态,DI 和 CLK 引脚上的信号将被忽略(无关)。当多个设备共享相同的 SPI 信号时,保持功能非常有用。 HOLD# 功能仅适用于标准 SPI 和 Dual SPI 操作,在 Quad SPI 期间,此引脚为 Quad I/O 操作的串行数据 IO(DQ 3)。 RESET(RESET#) RESET# 引脚允许在设备被主动选择时对其进行复位。当 QE=0(默认)和 HRSW=0(默认)时,RESET# 引脚被禁用。 硬件复位功能仅适用于标准 SPI 和 Dual SPI 操作,在 Quad SPI 期间,此引脚为 Quad I/O 操作或 Quad Output 操作的串行数据 IO(DQ3)。对于 SOP16 封装,RESET# 引脚是专用的硬件复位引脚,与设备设置或操作状态无关。如果不使用硬件复位功能,此引脚可以悬空或连接到系统中的 V CC 。将 RESET# 设置为低电平最短 1us(t HRST )将中断任何正在进行的指令,使设备处于初始状态。 RESET# 恢复高电平后,设备可以在 28us(t HRSL )内再次接受新指令。