XiaoMi-AI文件搜索系统
World File Search SystemUAV

长航时太阳能无人机的设计与开发...
无人机 (UAV) 在许多国家的野外侦察领域中都占有重要地位。续航能力是无人机的主要问题之一,通常大多数飞机使用普通燃料,会造成污染,而且使用寿命短且价格昂贵。因此,迫切需要使用非廉价的可耗尽能源作为燃料。太阳能是可利用的可持续能源之一。飞行器优化设计的简化和规划对于扩大使用范围以培育具有强大续航能力和可靠性的亚音速无人机具有重要意义。本文介绍了一种太阳能无人机的概念和初步设计方法,以实现更高的续航能力。为了对太阳能无人机进行理论计算,从现有飞机和无人系统统计获取了一些数据。通过对以前的无人机进行历史分析,可以更好地理解设计和最佳配置选择。本文的主要目的是设计一款高续航能力的固定翼太阳能无人机。在初步设计中,使用 Autodesk Fusion 360 软件设计机翼几何形状和无人机系统。此外,计算出合适的翼展为 4m,以完成 3-D 太阳能无人机的设计。性能分析已使用各种参数进行了理论计算。已经进行了深入研究,以找到所需的光伏太阳能电池和要安装在系统中的电池类型,以便将太阳能系统纳入其中以实现长续航能力。最终目标是设计和分析一款太阳能无人机,用于长续航应用,并配备电池和太阳能电池。关键词:太阳能无人机、长续航能力、概念设计、理论计算、电池、太阳能电池
为您的声音和愿景AI开发加油
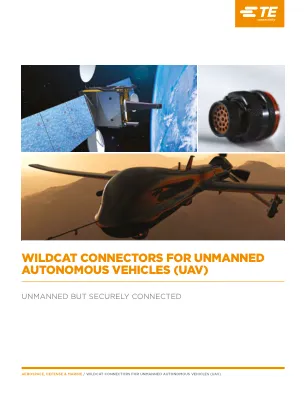
由TE工程师从MIL-C-38999系列1.5(Eurofighter Connector)开发,Wildcat UAV系列连接器是为自主市场设计的高规格连接器。te Wildcat UAV系列连接器提供了与标准军事设计相比的重量和空间节省,并且可以提供多种选择,中型和高密度布置最多128种带有四种壳样式的方式,以及五个钥匙道方向。有关技术规格,请参阅第24页。

增强自主无人机导航的隐私和安全性
摘要 - 自主无人驾驶汽车(UAV)已成为国防,执法,灾难响应和产品交付的重要工具。这些自主导航系统需要一个无线通信网络,并且最近是基于深度学习的。在诸如边境保护或灾难响应之类的关键场景中,确保自主无人机的安全导航至关重要。但是,这些自主无人机容易受到通过通信网络或深度学习模型的对抗性攻击 - 窃听 /中间 /成员 /成员推理 /重建。为了解决这种敏感性,我们提出了一种创新的方法,该方法结合了增强学习(RL)和完全同型加密(FHE),以实现安全的自主无人机导航。此端到端的安全框架是为无人机摄像机捕获的实时视频供稿而设计的,并利用FHE对加密的输入图像执行推断。虽然FHE允许对加密数据进行计算,但某些计算运算符尚未实现。卷积神经网络,完全连接的神经网络,激活功能和OpenAI Gym库被精心适应FHE域,以实现加密的数据处理。我们通过广泛的实验证明了我们提出的方法的功效。我们提出的方法可确保自主无人机导航中的安全性和隐私性,并且绩效损失微不足道。索引术语 - 自主无人驾驶汽车,完全同构加密,隐私,增强学习

自主无人机原型的设计用于检查隧道
可以根据特定要求定制针对GPS污染的隧道建设环境的无人机硬件平台设计。在[7]中,一种称为弹性微型传单的新型耐碰撞机器人旨在在密闭环境中进行导航。机器人保持低重量(<500g)和小框架(直径为0.32m),并通过在其坚硬的耐碰撞耐耐碰撞框架周围集成弹性襟翼来实现组合的刚性结合设计。在[8]中,为了提供快速的勘探能力,尤其是在地面机器人无法进入的区域中,使用了一支空中侦察员。这个空中机器人团队对建筑隧道环境的探索非常有用,同时考虑了一些极端的工作障碍。这些侦察员主要有三类,即中型多轨道,小型碰撞

无人机对沿海悬崖面的调查 - Archimer
无人机可用于监测悬崖表面。在本研究中,使用各种成像角度(天底、偏离天底 20 度、30 度和 40 度)进行了多次飞行,以评估成像角度对 3D 悬崖表面重建的影响。亚垂直悬崖出现的遮挡问题使得天底勘测几乎无关紧要。使用偏离天底 20 度、30 度和 40 度成像角度获得的结果在纹理恢复和精度方面令人满意,误差分别为 5.5 厘米、5.9 厘米和 4.9 厘米,倾斜角度越大,在悬崖的亚垂直或悬垂部分重建效果越好。本文还研究了影响悬崖表面连接点检测的其他参数,如有效重叠、无人机-悬崖表面距离和悬崖表面照明。提供了无人机勘测参数化的指导方针,旨在捕捉整个悬崖表面,并在与悬崖的距离、飞行高度和照片的空间分辨率之间取得良好的平衡。

使用 PID 控制器轻松跟踪无人机
摘要 本文的主要目的是设计一个数学模型来估计由三种算法控制的四电机(四轴飞行器)飞行机器人的行为;P 取决于当前误差;I 取决于过去误差的累积,D 用简单的策略预测未来误差(PID 控制器设计)。在这方面,提出了一种基于牛顿欧拉刚体动力学公式的运动控制方程。为了设计控制算法,我们做出了一些假设,例如忽略叶片拍打、周围流体速度。这种参数排除使模型灵活、简单,并且允许控制更高效、更易于设计,而无需昂贵的计算。使用 MATLAB 程序进行模拟研究。
无人机路线图 2002 - 空军杂志
本文件介绍了美国国防部 (DoD) 在未来 25 年(2002 年至 2027 年)开发和使用无人驾驶飞行器 (UAV) 和无人驾驶战斗机 (UCAV) 的路线图。国防部的作战无人机系统包括捕食者、猎人、影子和先锋,它们在最近的军事行动中表现出了强大的能力。全球鹰等发展中的系统和许多小型无人机系统也在最近的战斗和战斗支援行动中接受了考验。总的来说,这一技术领域为改变美国开展各种军事和军事支援行动的方式提供了巨大的机会。与任何新技术一样,人们自然不愿意过渡到全新的能力。在战斗和现实训练环境中充分展示无人机的能力对于这项技术的迁移至关重要。

仿生变形无人机纵向稳定性分析
无人驾驶飞行器 (UAV) 的固有特性使其能够开发新颖和创新的设计,通常采用最先进的技术,而无需处理与大型飞行器开发相关的许多限制,特别是在确保上述飞行器获得认证方面。此外,无人机的开发成本明显较低,微型飞行器 (MAV) 尤其如此。因此,在过去几年中,国立航空航天技术研究所“Esteban Terradas” (INTA) 一直在开发一种全新的仿生无人机,该无人机基于变形机翼技术,采用 Zimmerman 平面形状,使用宏纤维复合材料 (MFC) 执行器。由于该项目仍处于早期开发阶段,确保无人机的稳定性至关重要,尤其是考虑到其几何配置。为了实现上述稳定性,选择了 T 型尾翼配置。虽然已经通过稳定性增强系统 (SAS) 和基于 PID 的俯仰自动驾驶仪对仿生变形无人机的基本配置进行了初步纵向稳定性分析,但使用 MFC 执行器修改机翼对纵向稳定性的影响仍有待评估。因此,在目前的工作中,将对具有修改配置的仿生变形无人机的纵向稳定性进行分析,并将其与基本配置的纵向稳定性进行比较。还将评估修改 PID 系数是否有益。

突破性的持久无人机拯救了作战人员的生命......
一种能够长时间停留的“持久”无人机可能在哥伦拜恩提供帮助,也可能成为作战人员的救生工具。为了将这个想法变成现实,CyPhy Works 向小企业创新研究 (SBIR) 计划寻求开发资金。2009 年美国国家科学基金会颁发的初始 SBIR 第一阶段奖项后来被美国国防高级研究计划局 (DARPA) 于 2010 年“采纳”为第二阶段,从而获得了美国空军的快速创新资助奖 (RIF)。结果呢?一种口袋大小的系留无人机原型。这个概念演示器通过微丝系绳供电,使操作人员能够在危险的进入操作中保持在安全距离。

小型无人机万向节控制系统开发
目录 表格列表 ................................................................................................................................ viii 图表列表 ................................................................................................................................ ix 1 简介 ................................................................................................................................ 1 1.1 主题领域 ................................................................................................................ 1 1.2 一般问题 ................................................................................................................ 3 1.3 项目说明和目标 ...................................................................................................... 4 1.4 论文布局 ................................................................................................................ 5 2 背景信息 ...................................................................................................................... 7 2.1 视线稳定 ............................................................................................................. 7 2.1.1 阻尼与稳定 ................................................................................................ 10 2.1.2 主动与被动 ............................................................................................................. 11 2.2 机载稳定平台 ................................................................................................ 11 2.2.1 无人机