XiaoMi-AI文件搜索系统
World File Search Systemarduino
13 II 2025年2月https://doi.org/ ...
pune,马哈拉施特拉邦411001摘要:该项目的目的是使用Arduino MicroController和DS3231 RTC模块设计和实现实时时钟(RTC)系统。该项目旨在提供准确的计时功能,这在各种应用中至关重要,包括日常生活中的AI驱动系统。RTC系统利用通过I2C通信协议与DS3231 RTC模块连接的Arduino微控制器。20x4 LCD显示器用于视觉上显示当前日期和时间。该项目涉及将自定义固件编写和上传到Arduino,以管理时间管理,从RTC模块中检索数据,并在LCD上显示更新。在不同环境条件下,测试了设置的准确性和可靠性。由于高临界性DS3231 RTC模块,实现成功证明了最少的时间来保存精确的计时。系统通过20x4 LCD显示提供了一个用户友好的接口,该接口清楚地显示了当前日期和时间。I2C通信模块的无缝集成确保组件之间的有效数据传输。该项目强调了Arduino微控制器和RTC模块在构建可靠,准确的实时时钟系统中的有效使用。开发的系统可以作为各种AI应用程序(例如智能家庭自动化)的基本组件,在该应用程序中,准确的时机对于安排任务和优化系统性能至关重要。关键字:实时时钟(RTC),Arduino,Embedded Systems,DS3231,DS1307,TimeKeeping,I2C通信,20x4 LCD显示,AI日常生活中的AI该项目强调了将实时时钟系统集成到AI驱动的解决方案中以通过提供精确且可靠的计时功能来增强日常生活的重要性。
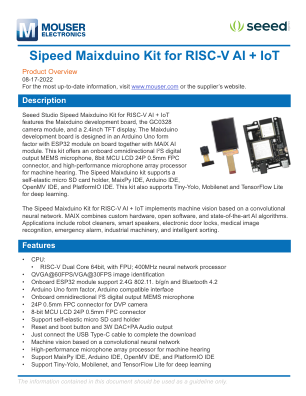
RISC-V AI + IoT 的 Sipeed Maixduino 套件
• CPU: • RISC-V 双核 64 位,带 FPU;400MHz 神经网络处理器 • QVGA@60FPS/VGA@30FPS 图像识别 • 板载 ESP32 模块支持 2.4G 802.11。 b/g/n 和蓝牙 4.2 • Arduino Uno 外形尺寸,Arduino 兼容接口 • 板载全向 I 2 S 数字输出 MEMS 麦克风 • 用于 DVP 摄像头的 24P 0.5mm FPC 连接器 • 8 位 MCU LCD 24P 0.5mm FPC 连接器 • 支持自弹式微型 SD 卡座 • 重置和启动按钮以及 3W DAC+PA 音频输出 • 只需连接 USB Type-C 电缆即可完成下载 • 基于卷积神经网络的机器视觉 • 用于机器听觉的高性能麦克风阵列处理器 • 支持 MaixPy IDE、Arduino IDE、OpenMV IDE 和 PlatformIO IDE • 支持用于深度学习的 Tiny-Yolo、Mobilenet 和 TensorFlow Lite

下载此 PDF 文件
金属探测器通过定位和识别金属物品,有助于各种学科的安全、保护和检测,在安全、考古和工业应用中发挥着重要作用。识别不同类型金属的必要性和对高水平安全系统的需求导致了对价格合理且灵敏的金属检测设备的需求。本文将磁脉冲感应 (PI) 技术用于金属探测器的开发。主控制电路采用 Arduino 控制器,允许使用液晶显示器 (LCD) 和移动应用程序控制和监控输入信号。电压传感器用于测量电路的模拟输出,并通过蓝牙模块将信息捕获到 Arduino。Arduino 控制器估计信号强度的百分比并将其显示在 LCD 上。同时,可以通过蓝牙将信号发送到移动应用程序,以便应用程序以颜色光谱的形式显示强度。对所提出的原型进行的测试结果表明,该系统以令人满意的精度和灵敏度运行。

为虚拟现实构建自定义实时传感器...
虚拟场景与现实世界之间的同步。然而,由于特定设备的可用性有限以及现有跟踪设备通常价格昂贵,这可能会阻止更多人使用 VR 技术。在本论文中,我探讨了将特定传感器配置连接到 VR 应用程序的过程,以便能够根据特定应用程序定制运动传感器,而不必依赖通常不符合应用程序需求的解决方案。MPU-6050 传感器非常精确,因为它每个通道都包含 16 位模拟到数字转换硬件。因此,它同时捕获 x、y 和 z 通道。传感器使用 I2C 总线与 Arduino 接口。Arduino Ethernet Shield 利用 UDP 通信程序为我们提供了一种在 Arduino 和任何所需软件应用程序之间进行交互的便捷方式。最后,通过三个实验展示了虚拟环境下实时仿真的应用,结果表明本工作可以为VR应用提供实时精准的运动跟踪。

高速公路灯的自动控制系统
这项研究提供了新的有效廉价的设计系统,可在所有城市地区道路和高速公路上节省电力耗散。该系统的目的是最大程度地减少高速公路和城市道路上的废物电力。设计的系统取决于两种Arduino电路类型,即主和从。The master Arduino has an ability to detect the day light by light dependent resistor (LDR) sensor and cars movements by pyroelectric infrared (PIR) sensor, according to these conditions, the master will send a signal by XBee module works as transmitter to the following five slaves Arduinos which are waiting for a signal and receive it by XBee module works as receiver to turn ON the lights for 5 minutes then OFF it if there在街上没有汽车运动。系统可以直接安装在高速公路灯上。该系统已经过测试和应用在路灯上,系统可以完美地工作,奴隶对主Arduino信号进行了迅速有效的响应。

家用自动太阳能植物浇水系统
摘要 本文介绍了一种自动太阳能植物浇水系统的开发,该系统将帮助那些难以找到足够时间灌溉植物的家庭园丁。该系统使用 DHT11 湿度温度传感器和土壤湿度传感器监测周围的种植园和植物下方的土壤状态。利用 Arduino IDE 程序,Arduino Uno R3 (Atmega 328p) 接收来自这些传感器的读数以确定植物的状态。为了确定植物是否获得足够的水并调节水泵进行灌溉,Arduino IDE 程序计算传感器值并确定土壤条件是高于还是低于阈值。要使自动植物浇水系统发挥作用,需要一个五伏太阳能电池板和一个 MPPT 充电控制器。DHT11 传感器和土壤湿度传感器的推荐范围在文章中有明确说明和记录。关键词:植物浇水、浇水系统、太阳能、家庭园艺、嵌入式系统

无人机进行消防操作
该项目的目的是建造无人机并将其附加到消防无人机的释放机制。该机制将由该团队成员设计和制造。无人机将使用已经存在的零件来构建,该团队将把它们组合在一起,以构建一辆可以符合当场扑灭,预防和检查火灾的所有要求的车辆。无人机将能够在很难通过常规方法接近的区域撒上水,或者以其他方式进行更昂贵的水。1.2范围它涉及开发用于遥感和消防组件的群平台,升级掉落机构,并开发风轨迹模型,以在木落垃圾,短针垃圾,垃圾垃圾和木花植被模型上使用最佳的掉落方法进行实验。2。方法论,该系统使用飞行控制器和Arduino Uno。整个消防系统将在Arduino Uno上工作,无人机将在飞行控制器上工作。在这里,我们还使用了传感器,例如超声波传感器来检测障碍物和用于检测火的火焰传感器。2.1框图中的框图中,您将看到主板是我们的Arduino Uno。此Arduino Uno连接到ESC(电子速度控制器),传感器和接收器。进一步的ESC连接到BLDC电动机,这些电动机用于旋转螺旋桨。在这里,火焰传感器将检测火,超声传感器将检测到障碍物。这是我们的无人机的工作方式。

DWM3000EVB
DWM3000EVB可以连接到大多数Nordic NRF5开发板。DWS3000示例最初是为NRF52840-DK设计的,并在MCU本机USB端口上使用USB-CDC。3.5.1北欧微控制器的SPI速度DWM3000模块支持38 MHz SPI总线时钟。SPI的速度对于某些应用中的时间可能至关重要。北欧NRF52系列微控制器的最大SPI速度从8到32 MHz不等。NRF52840-DK支持32 MHz SPI时钟速度,但是该开发板布局到Arduino扩展的长度SPI接线需要高驱动器水平以确保正确的操作。3.5.2将DWM3000EVB安装在NRF52840-DK上,在北欧NRF52840-DK上安装,在将任何Arduino型扩展安装到开发板上时,应注意。NRF52840-DK上的中间标头高于Arduino扩展连接器。由于董事会之间接触的距离或风险,如果需要,可以修剪中间头。否则,可以使用额外的女性扩展连接器来抬起盾牌。

Adafruit HUZZAH32-ESP32 Feather
240 MHz 双核 Tensilica LX6 微控制器,具有 600 DMIPS 集成 520 KB SRAM 集成 802.11b/g/n HT40 Wi-Fi 收发器、基带、堆栈和 LWIP 集成双模蓝牙(经典和 BLE) 4 MByte 闪存 板载 PCB 天线 超低噪声模拟放大器 霍尔传感器 10x 电容式触摸接口 32 kHz 晶体振荡器 3 x UART(Feather Arduino IDE 支持中仅默认配置两个,一个 UART 用于引导加载/调试) 3 x SPI(Feather Arduino IDE 支持中仅默认配置一个) 2 x I2C(Feather Arduino IDE 支持中仅默认配置一个) 12 x ADC 输入通道 2 x I2S 音频 2 x DAC 每个 GPIO 引脚上可用的 PWM/定时器输入/输出 带有 32 kB TRAX 缓冲区的 OpenOCD 调试接口 SDIO主/辅 50 MHz SD 卡接口支持

使用 MATLAB GUI 进行运动物体检测和跟踪...
摘要:移动物体检测和跟踪是安全应用之一,由于其在视频监控、交通监控和图像识别等领域的应用,引起了计算机视觉研究人员的极大兴趣。移动物体检测涉及在连续帧中识别物体,而物体跟踪用于监控相对于感兴趣区域的移动。在本研究中,使用 MATLAB 中的 Guide 创建了 GUI(图形用户界面),它提供软件应用程序的点击控制,无需学习语言或输入命令即可运行应用程序。在本文中,使用基于高斯混合模型的背景减法算法执行物体检测,该算法可以处理背景强度分布的较大变化,使用卡尔曼滤波器执行视频中的跟踪,该滤波器使用随时间观察到的一系列测量值,包含统计噪声和其他不准确性,并产生未知变量的估计值,这些估计值往往比仅基于单个测量值的估计值更精确,在物体周围绘制一个边界框以在物体在视频帧中移动时跟踪移动物体,每帧中物体的计数值显示在 MATLAB 命令窗口中。这里 MATLAB 与 Arduino 板(基于微控制器的板)连接,Arduino 板与 LED 连接,根据计数值 LED 的数量会发光。MATLAB 的计数值通过串行通信与 Arduino 板通信。关键词:移动物体检测、跟踪、引导、MATLAB、LED、Arduino、串行通信。