XiaoMi-AI文件搜索系统
World File Search SystemiD
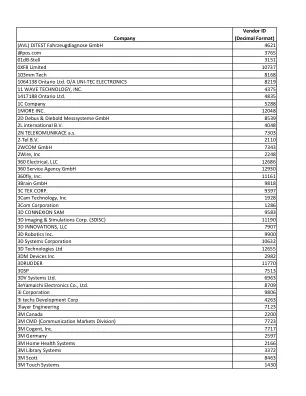
供应商 ID
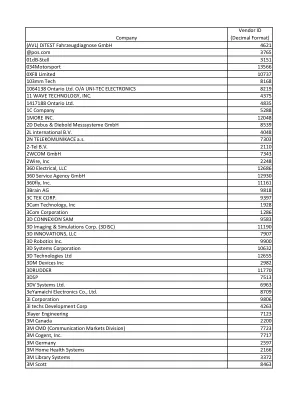
公司供应商 ID(十进制格式)(AVL)DiTEST Fahrzeugdiagnose GmbH 4621 (Silkland) 深圳市观海科技有限公司 13944 @pos.com 3765 01dB‐Stell 3151 034Motorsport 13566 0XF8 Limited 10737 1010music LLC 13966 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI‐TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, INC. 4375 1417188 Ontario Ltd. 4835 1C Company 5288 1MORE INC. 12048 28 Gorilla 13617 2D Debus & Diebold Messsysteme GmbH 8539 2L international BV 4048 2N TELEKOMUNIKACE as 7303 2‐Tel BV 2110 2WCOM GmbH 7343 2Wire, Inc 2248 360 Electrical, LLC 12686 360 Service Agency GmbH 12930 360fly, Inc. 11161 3Brain AG 9818 3C TEK CORP. 9397 3Cam Technology, Inc 1928 3Com Corporation 1286 3D CONNEXION SAM 9583 3D Imaging & Simulations Corp. (3DISC) 11190 3D INNOVATIONS, LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies Ltd 12655 3DM Devices Inc 2982 3DRUDDER 11770 3DSP 7513 3DV Systems Ltd. 6963 3eYamaichi Electronics Co., Ltd. 8709 3i Corporation 9806 3i techs Development Corp 4263 3layer Engineering 7123 3M 加拿大 2200 3M CMD(通信市场部门) 7723 3M Cogent, Inc. 7717 3M 德国 2597
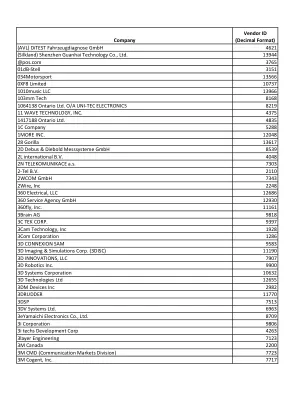
供应商 ID
公司供应商 ID(十进制格式)(AVL)DiTEST Fahrzeugdiagnose GmbH 4621 @pos.com 3765 01dB‐Stell 3151 0XF8 Limited 10737 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI‐TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, INC. 4375 1417188 Ontario Ltd. 4835 1C Company 5288 1MORE INC. 12048 2D Debus & Diebold Messsysteme GmbH 8539 2L international BV 4048 2N TELEKOMUNIKACE as 7303 2‐Tel BV 2110 2WCOM GmbH 7343 2Wire, Inc 2248 360 Electrical, LLC 12686 360 Service Agency GmbH 12930 360fly, Inc. 11161 3Brain GmbH 9818 3C TEK CORP. 9397 3Cam Technology, Inc 1928 3Com Corporation 1286 3D CONNEXION SAM 9583 3D Imaging & Simulations Corp. (3DISC) 11190 3D INNOVATIONS, LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies Ltd 12655 3DM Devices Inc 2982 3DRUDDER 11770 3DSP 7513 3DV Systems Ltd. 6963 3eYamaichi Electronics Co., Ltd. 8709 3i Corporation 9806 3i techs Development Corp 4263 3layer Engineering 7123 3M 加拿大 2200 3M CMD(通信市场部门) 7723 3M Cogent, Inc. 7717 3M 德国 2597 3M 家庭健康系统 2166 3M 图书馆系统 3372 3M Scott 8463 3Pea Technologies, Inc. 3637
供应商 ID
供应商 ID(十进制格式)(AVL)DiTEST Fahrzeugdiagnose GmbH 4621 @pos.com 3765 01dB-Stell 3151 0XF8 Limited 10737 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI-TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, INC. 4375 1417188 Ontario Ltd. 4835 1C Company 5288 1MORE INC. 12048 2D Debus & Diebold Messsysteme GmbH 8539 2L international BV 4048 2N TELEKOMUNIKACE as 7303 2-Tel BV 2110 2WCOM GmbH 7343 2Wire, Inc 2248 360 Electrical, LLC 12686 360 Service Agency GmbH 12930 360fly, Inc. 11161 3Brain GmbH 9818 3C TEK CORP. 9397 3Cam Technology, Inc 1928 3Com Corporation 1286 3D CONNEXION SAM 9583 3D Imaging & Simulations Corp. (3DISC) 11190 3D INNOVATIONS, LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies Ltd 12655 3DM Devices Inc 2982 3DRUDDER 11770 3DSP 7513 3DV Systems Ltd. 6963 3eYamaichi Electronics Co., Ltd. 8709 3i Corporation 9806 3i techs Development Corp 4263 3layer Engineering 7123 3M 加拿大 2200 3M CMD(通信市场部门) 7723 3M Cogent, Inc. 7717 3M 德国 2597 3M 家庭健康系统 2166 3M 图书馆系统 3372 3M Scott 8463 3M 触控系统 1430
供应商 ID
公司供应商 ID(十进制格式)(AVL)DiTEST Fahrzeugdiagnose GmbH 4621 (Silkland) 深圳市观海科技有限公司 13944 @pos.com 3765 01dB‐Stell 3151 034Motorsport 13566 0XF8 Limited 10737 1010music LLC 13966 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI‐TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, INC. 4375 1417188 Ontario Ltd. 4835 1C Company 5288 1MORE INC. 12048 28 Gorilla 13617 2D Debus & Diebold Messsysteme GmbH 8539 2L international BV 4048 2N TELEKOMUNIKACE as 7303 2‐Tel BV 2110 2WCOM GmbH 7343 2Wire, Inc 2248 360 Electrical, LLC 12686 360 Service Agency GmbH 12930 360fly, Inc. 11161 3Brain AG 9818 3C TEK CORP. 9397 3Cam Technology, Inc 1928 3Com Corporation 1286 3D CONNEXION SAM 9583 3D Imaging & Simulations Corp. (3DISC) 11190 3D INNOVATIONS, LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies Ltd 12655 3DM Devices Inc 2982 3DRUDDER 11770 3DSP 7513 3DV Systems Ltd. 6963 3eYamaichi Electronics Co., Ltd. 8709 3i Corporation 9806 3i techs Development Corp 4263 3layer Engineering 7123 3M Canada 2200 3M CMD(通信市场部门) 7723 3M Cogent, Inc. 7717
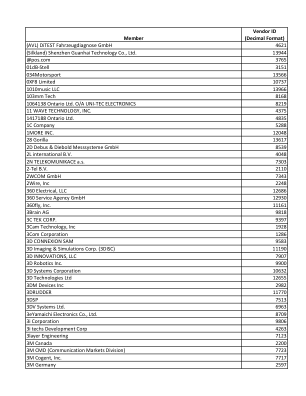
供应商 ID
会员供应商 ID(十进制格式)(AVL) DiTEST Fahrzeugdiagnose GmbH 4621 (Silkland) 深圳市观海科技有限公司 13944 @pos.com 3765 01dB‐Stell 3151 034Motorsport 13566 0XF8 Limited 10737 1010music LLC 13966 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI‐TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, INC. 4375 1417188 Ontario Ltd. 4835 1C Company 5288 1MORE INC. 12048 28 Gorilla 13617 2D Debus & Diebold Messsysteme GmbH 8539 2L international B.V. 4048 2N 电信公司7303 2‐Tel B.V. 2110 2WCOM GmbH 7343 2Wire, Inc 2248 360 Electrical, LLC 12686 360 Service Agency GmbH 12930 360fly, Inc. 11161 3Brain AG 9818 3C TEK CORP. 9397 3Cam Technology, Inc 1928 3Com Corporation 1286 3D CONNEXION SAM 9583 3D Imaging & Simulations Corp. (3DISC) 11190 3D INNOVATIONS, LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies Ltd 12655 3DM Devices Inc 2982 3DRUDDER 11770 3DSP 7513 3DV Systems Ltd. 6963 3eYamaichi Electronics Co., Ltd. 8709 3i Corporation 9806 3i techs Development Corp 4263 3layer Engineering 7123 3M 加拿大 2200 3M CMD(通信市场部门) 7723 3M Cogent, Inc. 7717 3M 德国 2597
供应商 ID
公司供应商 ID(十进制格式)(AVL)DiTEST Fahrzeugdiagnose GmbH 4621 @pos.com 3765 01dB‐Stell 3151 034Motorsport 13566 0XF8 Limited 10737 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI‐TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, INC. 4375 1417188 Ontario Ltd. 4835 1C Company 5288 1MORE INC. 12048 2D Debus & Diebold Messsysteme GmbH 8539 2L international BV 4048 2N TELEKOMUNIKACE as 7303 2‐Tel BV 2110 2WCOM GmbH 7343 2Wire, Inc 2248 360 Electrical, LLC 12686 360 Service Agency GmbH 12930 360fly, Inc. 11161 3Brain AG 9818 3C TEK CORP. 9397 3Cam Technology, Inc 1928 3Com Corporation 1286 3D CONNEXION SAM 9583 3D Imaging & Simulations Corp. (3DISC) 11190 3D INNOVATIONS, LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies Ltd 12655 3DM Devices Inc 2982 3DRUDDER 11770 3DSP 7513 3DV Systems Ltd. 6963 3eYamaichi Electronics Co., Ltd. 8709 3i Corporation 9806 3i techs Development Corp 4263 3layer Engineering 7123 3M 加拿大 2200 3M CMD(通信市场部门) 7723 3M Cogent, Inc. 7717 3M 德国 2597 3M 家庭健康系统 2166 3M 图书馆系统 3372 3M Scott 8463
供应商 ID
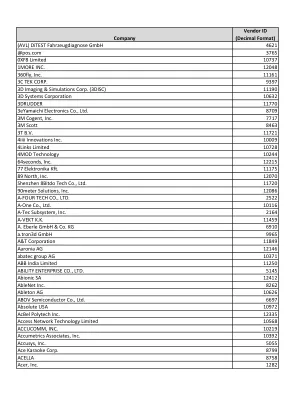
公司供应商 ID(十进制格式)(AVL) DiTEST Fahrzeugdiagnose GmbH 4621 @pos.com 3765 0XF8 Limited 10737 1MORE INC. 12048 360fly, Inc. 11161 3C TEK CORP. 9397 3D Imaging & Simulations Corp. (3DISC) 11190 3D Systems Corporation 10632 3DRUDDER 11770 3eYamaichi Electronics Co., Ltd. 8709 3M Cogent, Inc. 7717 3M Scott 8463 3T BV 11721 4iiii Innovations Inc. 10009 4Links Limited 10728 4MOD Technology 10244 64seconds, Inc. 12215 77 Elektronika Kft. 11175 89 North, Inc. 12070 深圳市八位堂科技有限公司 11720 90meter Solutions, Inc. 12086 A‐FOUR TECH CO., LTD. 2522 A‐One Co., Ltd. 10116 A‐Tec Subsystem, Inc. 2164 A‐VEKT KK 11459 A. Eberle GmbH & Co. KG 6910 a.tron3d GmbH 9965 A&T Corporation 11849 Aaronia AG 12146 abatec group AG 10371 ABB India Limited 11250 ABILITY ENTERPRISE CO., LTD. 5145 Abionic SA 12412 AbleNet Inc. 8262 Ableton AG 10626 ABOV Semiconductor Co., Ltd. 6697 Absolute USA 10972 AcBel Polytech Inc. 12335 Access Network Technology Limited 10568 ACCUCOMM, INC. 10219 Accumetrics Associates, Inc. 10392 Accusys, Inc. 5055 Ace Karaoke Corp. 8799 ACELLA 8758 Acer, Inc. 1282