XiaoMi-AI文件搜索系统
World File Search Systemsfm
无人机拍摄的高分辨率航拍图像可用于森林应用
因此,标准空中三角测量方法通常无法处理使用 UAV Haala 2012 获取的图像。现在有各种开源和商业密集立体匹配工具可用于应对这些挑战。采用源自计算机视觉并广泛用于近景摄影测量或地面摄影的算法(特征检测 SIFT、SfM)(Lowe 2004、Bryson 2010、Hauagge 2012)。以高度自动化的方式,可以估计相机几何形状并从一组重叠图像中计算 3D 模型,且不受尺度、方向、失真和照明变化的影响(Neitzel 2011、Turner 2012)。图像匹配得到的点云可以以与机载或地面激光扫描得到的点云类似的方式进行进一步处理,并且通常与激光扫描数据相结合。
无人机拍摄的高分辨率航拍图像可用于森林应用...
因此,标准空中三角测量方法通常无法处理使用 UAV Haala 2012 获取的图像。现在有各种开源和商业密集立体匹配工具可用于应对这些挑战。采用计算机视觉算法(特征检测 SIFT、SfM),广泛用于近距离摄影测量或地面摄影(Lowe 2004、Bryson 2010、Hauagge 2012)。可以以高度自动化的方式估计相机几何形状并从一组重叠图像中计算 3D 模型,不受比例、方向、失真和照明变化的影响(Neitzel 2011、Turner 2012)。图像匹配产生的点云可以以与机载或地面激光扫描产生的点云类似的方式进行进一步处理,并且通常与激光扫描数据相结合。

InstantsPlat:无界的稀疏视觉无姿势无姿势的高斯裂口在40秒内
虽然新颖的视图合成(NVS)在3D计算机视觉中取得了进步,但通常需要从密集的视点对摄像机内在和外部设备进行初始估计。这种预处理通常是通过结构 - 运动(SFM)管道来进行的,这是一种可以缓慢且不可靠的操作,尤其是在稀疏视图方案中,匹配的功能不足,无法进行准确的重建。In this work, we integrate the strengths of point-based representations (e.g., 3D Gaus- sian Splatting, 3D-GS) with end-to-end dense stereo mod- els (DUSt3R) to tackle the complex yet unresolved is- sues in NVS under unconstrained settings, which encom- passes pose-free and sparse view challenges.我们的框架工作,InstantsPlat,用3D-GS统一了密集的立体声先验,以构建稀疏场景的3D高斯大型场景 -

Skabek K.,Rola D.和Ozimek P。:摄影测量VS。激光雷达方法的augmument现实
3D空间中本地化问题一直是科学研究中经常考虑的话题,并且近年来在实践解决方案中实施。本地化任务的基础分区是室外和室内方法[Erkan Bostanci和Clark,2013年]。室外的主要基于视觉标记,进程方法,加速度计,陀螺仪和地理位置(GPS)。在室内应用的情况下,具有跟踪运动算法的视觉系统(SLAM-同时定位和映射)以及从图像序列(来自运动的SFM-结构)重建几何结构(Pangilinan等人,2019年)非常重要。这些软件方法是在流行的Arcore和Arkit库中实现的。正在遵守李子本身及其应用的动态发展。也正在开发实施这些任务的开发人员工具,例如Vuforia和Immersal,这是本文的重点。各种方法用于重建场景

两种基于图像的点云的全面比较...
计算机视觉和摄影测量的结合可以从图像中生成三维 (3D) 信息,这促进了点云在制图方面的广泛应用。大规模地形图制作需要高精度和准确度的 3D 数据来表示地球表面的真实状况。除了 LiDAR 点云之外,基于图像的匹配也被认为能够从多视图图像中生成可靠且详细的点云。为了检验和分析 LiDAR 和基于图像的匹配在大规模详细制图方面的可能融合,点云由半全局匹配 (SGM) 和运动结构 (SfM) 生成。为了进行全面和公平的比较,本研究使用了同时获取的航空照片和 LiDAR 数据。定性和定量评估已用于评估 LiDAR 和图像匹配点云数据的可视化、几何精度和分类结果。比较结果得出结论,LiDAR 是大规模制图的最佳数据。

无人机平台和 3D 调查和建模中的 SfM-MVS 方法:文化遗产领域的回顾
摘要:近年来,运动结构 (SfM) 和多视角立体 (MVS) 算法已成功应用于安装在无人机 (UAV) 平台上的摄像机生成的立体图像,以构建 3D 模型。事实上,基于 SfM-MVS 和 UAV 生成的图像组合的方法可以实现经济高效的采集、快速自动化处理以及 3D 模型的详细和准确重建。因此,这种方法在文化遗产 (CH) 领域的表示、管理和保护中变得非常流行。因此,本综述论文讨论了无人机摄影测量在 CH 环境中的使用,重点关注图像采集技术和 3D 模型构建软件的最新趋势和最佳实践。尤其是,本文旨在强调与可用的不同平台和导航系统相关的不同图像采集和处理技术,以及分析和深化有效描述整个摄影测量过程的 3D 重建方面,为不同领域的新应用提供进一步的见解,例如结构工程以及属于 CH 领域的遗址和结构的保护和维护修复。
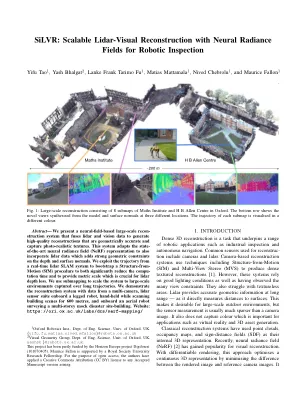
SILVR:可伸缩的LIDAR-VISUAL-VISUAL RETUSTRUTION,具有机器人检查的神经辐射场
摘要 - 我们提出了一个基于神经场的大规模重构系统,该系统融合了激光雷达和视力数据,以生成几何准确的高质量重建,并捕获光真逼真的纹理。该系统适应了状态的神经辐射场(NERF)表示,还结合了LiDAR数据,该数据在深度和表面正常上增加了强大的几何约束。我们利用轨迹从实时激光雷达大满贯系统来引导结构 - 从运动(SFM)程序进行启动,以显着降低组合时间,并提供对大暴力深度损失至关重要的度量标准。我们使用沉积将系统扩展到在长轨迹上捕获的大规模环境。我们通过来自多台摄像机,LIDAR传感器套件的腿部机器人的数据,在扫描600米的扫描建筑场景时进行手持式机器人,并在船上进行空中机器人,调查多层模拟模拟灾难现场建造的空中机器人。网站:https://ori.ox.ac.uk/labs/drs/nerf-mapping/
综述 无人机平台与3D测量与建模中的SfM-MVS方法:文化遗产领域的综述
摘要:近年来,运动结构 (SfM) 和多视角立体 (MVS) 算法已成功应用于安装在无人机 (UAV) 平台上的摄像机生成的立体图像,以构建 3D 模型。事实上,基于 SfM-MVS 和 UAV 生成的图像组合的方法可以实现经济高效的采集、快速自动化处理以及 3D 模型的详细和准确重建。因此,这种方法在文化遗产 (CH) 领域的表示、管理和保护中变得非常流行。因此,本综述论文讨论了无人机摄影测量在 CH 环境中的使用,重点关注图像采集技术和 3D 模型构建软件的最新趋势和最佳实践。尤其是,本文旨在强调与可用的不同平台和导航系统相关的不同图像采集和处理技术,以及分析和深化有效描述整个摄影测量过程的 3D 重建方面,为不同领域的新应用提供进一步的见解,例如结构工程以及属于 CH 领域的遗址和结构的保护和维护修复。

无人机系统(UAS)在河道沿线河岸侵蚀监测中的应用
摘要 过度的河岸侵蚀是许多河流系统中细沉积物和相关营养物的重要来源,同时也对基础设施构成威胁。使用高分辨率地形数据进行地貌变化检测是监测河流沿线河岸侵蚀程度的有效方法。无人机系统 (UAS) 和运动结构 (SfM) 摄影测量技术的最新进展使得获取高分辨率地形数据成为可能,这也是本研究中使用的方法。为了评估基于 UAS 的摄影测量对河岸侵蚀监测的有效性,一架固定翼 UAS 在两年内多次被部署在美国东北部佛蒙特州中部的 20 公里河流走廊进行勘测。数字高程模型 (DEM) 和差异 DEM 可以量化发生明显侵蚀的勘测区域中选定部分的体积变化。结果表明,只要调查是在早春(融雪后但夏季植被生长之前)进行的,UAS 就能够以高分辨率收集高质量的地形数据,即使是在植被茂密的河流走廊沿线。使用 UAS 对河岸运动的长期估计与之前收集的机载激光雷达调查结果相比具有良好的可比性,并且可以可靠地量化河流沿岸的重大地貌变化。

从随机飞行中获取的图像可以看出地形发生了变化...
摘要。获取数据来分析地形变化通常是一项昂贵的工作,需要大量、有潜在风险的实地工作和/或昂贵的设备或商业数据。近年来,降低成本同时保持精度和准确度一直是地球科学研究的重点。运动结构 (SfM) 摄影测量技术正在成为强大的测量工具,现代算法和强大的计算能力允许从低成本的非正式调查中生成准确而详细的数据。高空间和时间分辨率允许监测正在经历相对快速变化的地貌特征,例如冰川、冰碛或山体滑坡。我们提出了一种方法,利用执行其他任务的轻型运输飞机来机会性地收集图像以进行地貌分析。我们测试并验证了一种方法,即在直升机上安装一个消费级相机和一个简单的基于代码的全球导航卫星系统 (GNSS) 接收器,以便在飞行路径覆盖感兴趣的区域时收集数据。我们的方法基于并建立在 Welty 等人 (2013) 的基础上,展示了无需复杂的物理或电子链接即可将 GNSS 数据链接到图像的能力,即使相机时钟不精确且时间间隔不规则。作为概念验证,我们于 2014 年 9 月和 2015 年 9 月在斯瓦尔巴群岛西北部的 Midtre Lovénbreen 冰川及其前缘进行了两次测试调查。