XiaoMi-AI文件搜索系统
World File Search System和蛇河

Montivipera bornmuelleri蛇毒液的神经和心血管活动
1 Inserm,CNRS,Mitovasc,Equipe Carme,SFR ICAT,Angers University,49000 Angers,法国; Christina.sahyoun1@gmail.com(C.S.); cesar.mattei@univ-angers.fr(c.m.); christian.legros@univ-angers.fr(c.l.)2 Laboratory of Applied Biotechnology (LBA3B), Azm Center for Research in Biotechnology and Its Applications, EDST, Lebanese University, Tripoli 1300, Lebanon 3 Institut de G é n é tique et de Biologie Mol é culaire et Cellulaire (IGBMC), INSERM, CNRS, Universit é de Strasbourg, 67400法国Illkirch; krezel@igbmc.fr 4 CNRS,INP,INP,神经病学研究所,AIX-MARSELILLE大学,13385法国Marseille,法国5号,5个生物学系,科学系3,米歇尔·斯莱曼(Campus Michels),米歇尔·斯莱曼(Michelse Slayman),黎巴嫩大学,黎巴嫩大学,拉多尔(Livoli); ziad.fajloun@ul.edu.lb(Z.F.); mohamad.rima@hotmail.com(M.R.)†当前地址:校园治疗学,校园De L'Institut Pasteur de Lille,法国59000 Lille。


一般规格 - 横河
结构:加热器和热电偶可更换结构。非防爆。相当于 NEMA4X/IP 66(仅通过压力补偿再循环至炉子)接线盒外壳:材料;铝合金接线盒油漆颜色:外壳;灰白色 (Munsell 5.6BG3.3/2.9 盖板;苔绿色 (Munsell 5.6BG3.3/2.9) 表面处理:聚氨酯防腐涂层 气体连接:1/4 FNPT 接线连接:1/2 NPT 安装:法兰安装 重量:插入长度 0.4 m:约6 千克 (JIS 5K-65) / 约11 千克 (ANSI 150-4) 插入长度 1.0 m:约8 千克 (JIS 5K-65) / 约13 千克 (ANSI 150-4) 插入长度 1.5 m:约10 千克 (JIS 5K-65) / 约15 千克 (ANSI 150-4) 插入长度 2.0 m:约12 千克 (JIS 5K-65) / 约17 千克 (ANSI 150-4) 插入长度 3.0 m:约15 千克 (JIS 5K-65) / 约20 千克 (ANSI 150-4) 插入长度 3.6 m:约17 千克 (JIS 5K-65) / 约22 千克 (ANSI 150-4) 插入长度 4.2 m:约19 千克(JIS 5K-65)/约24 千克(ANSI 150-4) 插入长度 4.8 米:约21 千克(JIS 5K-65)/约26 千克(ANSI 150-4) 插入长度 5.4 米:约23 千克(JIS 5K-65)/约28 千克(ANSI 150-4)

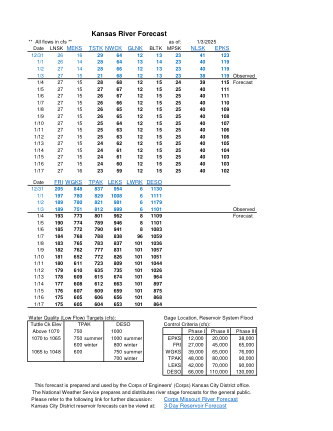
堪萨斯河预报
** 所有流量以 cfs 为单位 ** 截至:日期 LNSK MEKS TSTK NWCK GLNK BLTK MPSK NLSK EPKS 12/31 26 16 29 64 12 13 23 41 123 1/1 26 14 28 64 13 14 23 40 119 1/2 27 14 28 66 12 13 23 40 119 1/3 27 15 21 68 12 13 23 38 119 观测值 1/4 27 15 28 68 12 15 24 39 115 预测值 1/5 27 15 27 67 12 15 25 40 111 1/6 27 15 26 67 12 15 25 40 111 1/7 27 15 26 66 12 15 25 40 110 1/8 27 15 26 65 12 15 25 40 109 1/9 27 15 26 65 12 15 25 40 108 1/10 27 15 25 64 12 15 25 40 107 1/11 27 15 25 63 12 15 25 40 106 1/12 27 15 25 63 12 15 25 40 106 1/13 27 15 24 62 12 15 25 40 105 1/14 27 15 24 61 12 15 25 40 104 1/15 27 15 24 61 12 15 25 40 103 1/16 27 15 24 60 12 15 25 40 103 1/17 27 16 23 59 12 15 25 40 102

鳗鱼装:封闭的行星蛇机器人模拟器...
eels-darts是一种模拟器,旨在用于自治的自由开发和分析,以用于太空探索的蛇形机器人。介绍了鳗鱼点模拟器设计的详细描述。这包括用于建模各种不同的蛇机器人配置的多功能多体动力学表示以及用于描述螺丝冰相互作用的各向异性摩擦模型。讨论了其他模拟组件,例如图形,可进口地形,关节控制器和感知。讨论了用于设置和运行模拟的方法,包括如何使用ROS模拟蛇机器人的自主堆栈关闭命令和信息循环。描述了多种用例,以说明如何在整个项目的生命周期中使用模拟来帮助和告知机器人设计,自主性开发和现场测试用途。对螺丝冰接触模型进行了验证分析。最后,讨论了最近对加拿大Athabasca冰川进行现场测试期间的模拟使用概述。
意识到蛇咬的意识会议举行PANAJI
与生物多样性监测委员会Keri Sattari和Vivekanand Dnyanmandir高中联合政府艺术,科学和商业学院校友事务系,Keri组织了一项关于蛇的bite管理和学生安全实践的认识。

增强学习基于复杂环境中蛇机器人的运动控制
抽象的蛇机器人由于其特殊的身体和步态而变得富裕。但是,由于其复杂的模型,很难计划在多孔环境中进行运动。为了解决这个问题,这项工作研究了一种基于学习的运动计划方法。为可行的路径计划,并提出了一种修改的深Q学习算法,提出了一种弗洛伊德移动的平均算法,以确保蛇机器人通过的路径的平稳性和适应性。一种改进的路径积分算法用于解决步态参数以控制蛇机器人以沿计划的路径移动。为加快参数的训练,设计了一种结合串行训练,并行培训和经验重播模块的策略。此外,我们设计了一个运动计划框架,包括路径计划,路径平滑和运动计划。进行了各种模拟,以验证所提出的算法的效果。
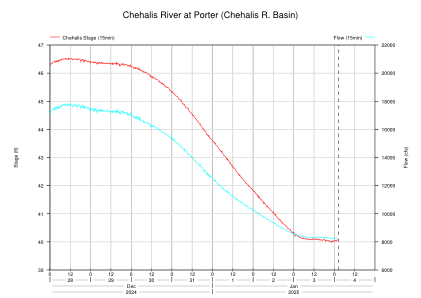
波特的奇黑利斯河(奇黑利斯河盆地)
2024 2025 十二月 一月 28 29 30 31 1 2 3 4 0 12 0 12 0 12 0 12 0 12 0 12 0 12 0 12 0 12