XiaoMi-AI文件搜索系统
World File Search System城市道路

合作,连接和自主流动性:使用基于储备机制的交叉口的协调
摘要 - 公路运输对于个人和商品的发展至关重要,也有助于经济发展。对城市道路充血的重要贡献是使用常规交通信号的交叉控制不佳。在这项工作中,我们提出了一个分散的多代理系统机制,用于连接自动驾驶汽车的道路交集管理,包括排地层的协调。我们提出了一种基于预订的机制,能够最大化交叉点的整体车辆吞吐量。该研究介绍了i)拍卖作为将预订分配给车辆的第一次服务政策的替代方案,ii)一种解决冲突保留之间争议的方法。结果证明了使用排量改善吞吐量和交叉控制平均延迟的好处。该方法的分布性质通过将大部分计算负担从交叉路口管理器转移到驾驶剂来提高可扩展性。
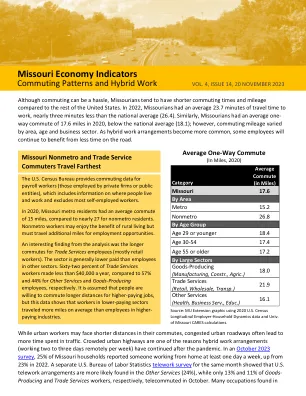
密苏里经济指标 - 通勤...
尽管城市工人的通勤可能会遇到较短的距离,但拥挤的城市道路通常会导致更多的时间在交通中。拥挤的城市高速公路是混合工作安排(每周两到三天的工作)的原因之一。在2023年10月的一项调查中,密苏里州有25%的家庭报告说,每周至少有一天在家工作,高于2022年的23%。同期的美国劳工统计局单独的远程远程运营调查表明,美国远程办公室的安排更有可能在其他服务(24%)中发现,而分别在10月远程销售的商品生产和贸易服务工作人员中只有13%和11%。在
行动报告 地面交通网络规划更新
地面交通网络规划旨在通过使用预留车道、交叉路口和信号改善以及公交站乘客舒适度改善等工具,在主干道沿线创建一个综合的地面交通优先走廊网络,从而为城市道路网络中的公共交通提供优先权。交通优先走廊的评估基于五个标准:现有交通客流量、公平性、与高阶交通的连通性、人口和就业增长以及实施的便利性。累积得分较高的走廊将被考虑纳入实施计划。STNIS 的评估和优先排序过程、调查结果和建议将成为指导和规划未来环境评估和工程研究的起点。在公众咨询之后,作为寻求市议会批准最终 STNP 的报告的一部分,将制定 2021-2024 年实施计划,以提前提出具体的地面交通优先项目,以供随后的市议会批准。每组项目预计都有一个三年的项目周期:
Nordicway 3最终报告:协调合作的飞行员...
摘要Nordicway 3项目通过19个在芬兰,瑞典和挪威的城市和主要道路网络上进行的19个试点项目,涉及合作,连接和自动移动性(CCAM)。这些飞行员证明并测试了CCAM服务,重点是现实情况下的技术,基础设施和商业模式的开发。关键成就包括:•创新的CCAM飞行员:飞行员探索了城市,城市和高速公路环境,将交通操作与互联车辆相结合。服务使用的乘用车,重型货车,公共汽车和No-Madic设备,通过蜂窝及其G5通信连接。•技术进步:飞行员在北欧天气条件下提供了对操作设计域(奇数)要求的见解。道路网络和路面状况数据收集的自动化方法被证明更快,成本效益和用户友好。•协调和互操作性:所有服务都符合C-ROADS规范,促进了欧洲C-ITS服务的标准化。•利益相关者的合作与生态系统:国家和城市道路当局,电信提供商,车辆OEM和研究机构的参与促进了CCAM生态系统的创建。

hexagonal Boron中的供体对手对量子发射器...
摘要 - 具有驾驶自动化的车辆正在为全球部署而开发。但是,这种自动化或自动驾驶汽车(AV)的车载感应和感知能力可能不足以确保在所有情况和环境下的安全性。使用路边基础设施传感器的基础设施启动环境感知可以被视为有效的解决方案,至少对于所选的感兴趣的地区,例如城市道路交叉路口或弯曲的道路,将其呈现给AV。但是,它们为采购,安装和维护而产生了明显的费用。因此,这些传感器必须在战略上和最佳的位置放置,以根据道路使用者的整体安全性产生最大的好处。在本文中,我们提出了一种新的方法,以获得最佳的V2X(车辆到全部)基础设施传感器的最佳位置,该传感器对城市AV部署特别有吸引力,并具有各种考虑,包括成本,承保范围,覆盖范围和冗余。我们结合了射线播放和线性优化文献中最新的进步,以为城市的规划师,Traf-trif C Analysis和AV部署运营商提供工具。通过在代表性环境中的实验评估,我们证明了方法的好处和实用性。

通过POP提高自主驾驶安全性:准确观察到的轨迹预测的框架
摘要 - 准确的轨迹预测对于安全有效的自主驾驶至关重要,但是处理部分观察的驾驶提出了重大挑战。为了解决这个问题,我们提出了一个新颖的轨迹预测框架,称为拥挤的城市道路场景,称为部分观测预测(POP)。该框架由两个关键阶段组成:自我监督学习(SSL)和特征蒸馏。POP首先采用SLL来帮助模型学习重建历史记录表示形式,然后将功能蒸馏作为微调任务来从教师模型中转移知识,该教师模型已通过完整的观察进行了预先训练,该模型只有很少的观察结果。POP取得了与开环实验中最高表现方法的可比结果,并且在包括安全指标在内的闭环模拟中优于基线方法。定性结果说明了POP在提供合理和安全的轨迹预测中的优越性。演示视频和代码可在https://chantss.github.io/pop/上找到。
洛赫雷地方区域规划 2024-2030
气候行动计划(CAP)(2023 年) 城市发展和建筑高度规划当局指南 新公寓设计标准(2020 年) 发挥我们的农村潜力:农村发展行动计划 零售规划指南(2012 年) 更智能的旅行 – 可持续的交通未来 – 2009 年至 2020 年爱尔兰新交通政策 远程工作:国家远程工作战略 2021 年 国家和地区绿道未来发展战略,2018 年 规划系统和洪水风险管理 – 规划当局指南(2009 年) 计划和项目的适当评估 – 规划当局指南(2009 年) 残疾人行动计划框架 “全政府”国家残疾人包容战略 (NDIS) 2017-2022;联合国残疾人权利公约(UNCRPD);城市道路和街道设计手册(DMURS) 临时建议说明 e – 2020 年发布的 Covid-19 大流行应对;计划草案中对 2019 年版 DMURS 的引用应替换为对 2020 年 DMURS 临时建议说明 - Covid-19 疫情应对;连接爱尔兰农村流动计划(2022-2025 年)的引用
1\ekhlkan - 亚马逊 AWS
• KM 询问工作北边的公寓项目是否有任何更新。SB 已将 Bill Rotecki SE 的信息提供给 SE 以进行协调。SE 报告称尚未联系。SB 指出,任何城市许可都取决于 Rotecki 先生与项目的协调。SE 表示担忧,并认为我们可能需要做的不仅仅是交换电话号码。CD 希望他了解项目的期望和需求,包括宽度和通道,以便项目不会受到不利影响。SB 在颁发许可证之前,城市许可需要采取一些步骤,例如交通控制计划(包括持续时间、时间范围和通过该区域的车道宽度),并且 Rotecki 先生知道必须提交这些步骤。SB 将与项目团队分享城市许可所需的内容。JS 评论说,市政府已经明确表示,水街项目得到了市政府的全力支持,并且具有优先权,因为它是一条城市道路,完工后将移交。JS 表示,至少有一条车道必须为项目服务车辆开放。

与混合自主工具的交点信号车辆耦合协调
摘要 - 连接和自动驾驶汽车(CAVS)预计可以减轻交通拥堵,尤其是在路交叉口,这是城市道路网络的主要瓶颈。本文提出了一种信号车辆耦合的最佳控制策略,用于骑士和人类驱动的车辆的混合交通流量。该方法遵循两层体系结构,该结构将信号车辆控制任务制定为两个通过混合排的概念串联的优化问题,以便中央协调员可以有效地解决它们。尤其是上层设计的,以最大程度地减少交叉路口中所有车辆的总等待时间,而下层则是通过充分利用信号计划,交叉车辆的数量以及在上层中获得的目标交叉速度来最大程度地减少汇总的车辆能量消耗。提供了广泛的仿真结果,以检查所提出的信号车辆关节控制框架的性能,并以不同的CAV穿透率,交通需求和电动汽车比率揭示新算法引入的影响。与现有方法的比较证明了在燃料使用和交通吞吐量方面提出的方法的好处。

2024全州拥塞概述
•自2000年以来,州拥有的泳道英里有17%,国有的车道英里增加了4.6%,总VMT的61%发生在州高速公路上 - 州际公路为26%,非州际公路为34%。•61%的全州车道里程由县拥有,自2000年以来,县拥有的车道里程增长了9.8%,总VMT的20%发生在县公路和道路上。•全州迈尔的22%由城市所有,自2000年以来,城市拥有的车道里程增长了13.8%,总VMT的20%发生在城市街道上。•州高速公路的总重型和中型卡车VMT,县和城市道路的78%占22%,•重型卡车占全州VMT的6.6%,中型卡车占全州VMT的2.6%。俄勒冈州的人口集中在大都市地区。在2023年,有64%的人口位于8个大都市地区,52%的州人口位于波特兰的三个最大的大都市地区,塞勒姆·凯泽(Salem-Keizer)和I-5走廊上的Eugene-Springfield。城市旅行需求集中在大都市地区,随着时间的流逝,拥堵的发生,尤其是在波特兰地区,历史上约有一半的新人口。