XiaoMi-AI文件搜索系统
World File Search System跟踪误差
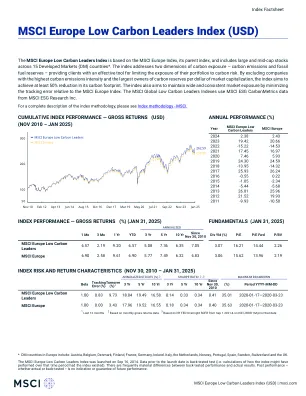
MSCI欧洲低碳领导人指数(USD)
MSCI欧洲低碳领导者指数基于MSCI欧洲指数,其母公司指数,并包括15个发达市场(DM)国家 /地区的大型和中型股票*。该指数解决了碳曝光的两个维度 - 碳排放和化石燃料储量 - 为客户提供有效的工具,以限制其投资组合暴露于碳风险。通过排除碳排放强度最高和最大碳储量所有者的每美元市值的公司,该指数旨在使其碳足迹的降低至少50%。该指数还旨在通过最大程度地减少相对于MSCI欧洲指数的跟踪误差来维持广泛而一致的市场敞口。MSCI全球低碳领导者索引使用MSCI Carbonmetrics数据来自MSCI ESG Research Inc.

尽快:对模拟和现实世界进行一致学习敏捷的人形全身技能
训练补偿动力不匹配的三角洲(残留)动作模型。然后用Delta动作模型集成到模拟器中,以ASAP微调进行预训练的策略,以有效地与现实世界动力学对齐。我们在三种转移方案中尽快评估了ISAACGYM到Isaacsim,Isaacgym到Genesis和Isaacgym,以及真实世界的G1人类人体机器人。我们的方法显着提高了各种动态运动的敏捷性和全身协调,与Sysid,DR和Delta动力学学习基准相比,跟踪误差减少了。尽快实现了以前难以实现的高度敏捷运动,这证明了在桥接模拟和现实世界动力学中的三角洲动作学习的潜力。这些结果表明,可以开发出更具表现力和敏捷的人形生物的有希望的SIM到真实方向。
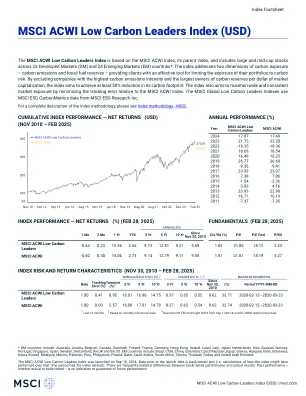
MSCI ACWI低碳领先者指数(USD)
MSCI ACWI低碳负责人指数基于MSCI ACWI指数,其母公司指数,包括23个发达市场(DM)和24个新兴市场(EM)国家 /地区*的大型和中型股票*。该指数解决了碳曝光的两个维度 - 碳排放和化石燃料储量 - 为客户提供有效的工具,以限制其投资组合暴露于碳风险。通过排除碳排放强度最高和最大碳储量所有者的每美元市值的公司,该指数旨在使其碳足迹的降低至少50%。该指数还旨在通过最大程度地减少相对于MSCI ACWI指数的跟踪误差来维持广泛而一致的市场敞口。MSCI全球低碳领导者索引使用MSCI Carbonmetrics数据来自MSCI ESG Research Inc.
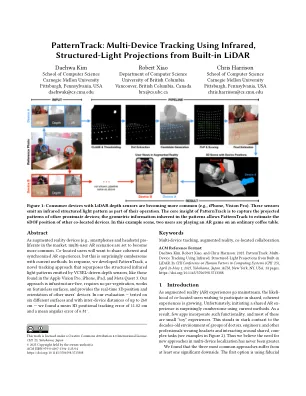
模式跟踪:使用内置LIDAR的红外线,结构化投影进行多设备跟踪
作为市场中增强现实设备(例如智能手机和耳机)在市场上的生命力,多用户AR场景将变得更加普遍。共同关联的用户将希望共享连贯和同步的AR体验,但这与当前方法令人惊讶。为了响应,我们开发了模式TractTrack,这是一种新颖的跟踪方法,可重新利用VCSEL驱动的深度传感器发出的结构化红外光图案,例如Apple Vision Pro,iPhone,iPad和Meta Quest 3.我们的方法不含基础架构,不需要预先注册,在无功能方面工作,并提供了其他用户设备的实时3D位置和方向。在我们的评估中 - 在六个不同的表面上进行了测试,并且设备间距离为260厘米 - 我们发现平均3D位置跟踪误差为11.02 cm,平均角度误差为6.81°。
改进直接索引:130/30 和 150/50 策略
资料来源:AQR、XPressFeed、S&P、MSCI Barra。我们从 1975 年到 2019 年每年 1 月 1 日开始运行 45 个单独的策略模拟,所有模拟都于 2019 年 12 月 31 日结束。对于直接指数化,我们每月都会将税收成本和交易成本降至最低,但前提是保持在与标准普尔 500 指数的预先指定的跟踪误差(使用 MSCI Barra 风险模型计算)范围内。对于 130/30 和 150/50,在每月重新平衡中,我们最大化价值动量因子模型的敞口,并将税收成本和交易成本降至最低,但前提是保持在与标准普尔 500 指数的预先指定的跟踪误差(使用 MSCI Barra 风险模型计算)范围内。交易成本根据 VIX、股票风险和相对于股票交易量的交易量计算。对于税收成本,我们模拟了两种替代税率假设:2020 年税率制度和拟议的拜登税收计划制度。在 2020 年税率制度下,短期资本收益的税率假设为 40.8%,长期资本收益和股息收入的税率假设为 23.8%。我们假设,根据拜登税收计划,所有收益和股息均按 43.4% 的统一税率征税。在报告税收优惠时,我们会分别针对只能抵消长期资本收益的投资者和可以同时抵消长期资本收益和短期资本收益的投资者计算税收优惠。此外,我们通过计算有效税率或未来税负的预期现值来核算未实现资本收益。我们对 2020 年税率制度和拜登税收计划制度分别采用 10% 和 25% 的有效税率。最后,所有税收优惠均相对于基准计算,基准被建模为直接持有被动 ETF,该 ETF 分配股息收入但不产生任何资本收益,并且所有其他建模选择(资本流动、慈善捐款和税率)均一致应用。

并网光伏系统三相逆变器基于无源性的黎曼刘维尔分数阶滑模控制
由于环境条件多变,光伏 (PV) 系统参数始终是非线性的。在多种不确定性、干扰和时变随机条件的发生下,最大功率点跟踪 (MPPT) 很困难。因此,本研究提出了基于被动性的分数阶滑模控制器 (PBSMC),以检查和开发 PV 功率和直流电压误差跟踪的存储功能。提出了一种独特的分数阶滑模控制 (FOSMC) 框架的滑动面,并通过实施 Lyapunov 稳定性方法证明了其稳定性和有限时间收敛性。还在被动系统中添加了额外的滑模控制 (SMC) 输入,通过消除快速不确定性和干扰来提高控制器性能。因此,PBSMC 以及在不同操作条件下的全局一致控制效率是通过增强的系统阻尼和相当大的鲁棒性来实现的。所提技术的新颖之处在于基于黎曼刘维尔 (RL) 分数阶微积分的 FOSMC 框架的独特滑动曲面。结果表明,与分数阶比例积分微分 (FOPID) 控制器相比,所提控制技术可在可变辐照度条件下将 PV 输出功率的跟踪误差降低 81%。与基于被动性的控制 (PBC) 相比,该误差降低 39%,与基于被动性的 FOPID (EPBFOPID) 相比,该误差降低 28%。所提技术可使电网侧电压和电流的总谐波失真最小。在不同太阳辐照度下,PBSMC 中 PV 输出功率的跟踪时间为 0.025 秒,但 FOPID、PBC 和 EPBFOPID 未能完全收敛。同样,直流链路电压在 0.05 秒内跟踪了参考电压,但其余方法要么无法收敛,要么在相当长的时间后才收敛。在太阳辐射和温度变化期间,使用 PBSMC,光伏输出功率在 0.018 秒内收敛,但其余方法未能收敛或完全跟踪,与其他方法相比,由于 PBSMC,直流链路电压的跟踪误差最小。此外,光伏输出功率在 0.1 秒内收敛到参考功率

四旋翼飞行器精确准悬停控制的风速估计
本文重点研究了无风传感器的四旋翼飞行器的控制,这些飞行器需要在存在中等但未知的阵风的情况下准确跟踪低速轨迹。通过将风扰动建模为外源输入,并假设可以通过准静态飞行器运动补偿其影响,本文提出了一种创新的估计和控制方案,该方案包括一个线性动态滤波器,用于估计此类未知输入,并且只需要位置和姿态信息。该滤波器建立在未知输入观察器理论的结果之上,允许在不测量风本身的情况下估计风和飞行器状态。可以使用简单的反馈控制律来补偿由扰动引起的偏移位置误差。只要有相应的应用转子速度,所提出的滤波器就与用于消除跟踪误差的恢复控制方案无关。首先使用机器人操作系统中间件和 Gazebo 模拟器在模拟环境中检查该解决方案,然后使用四旋翼飞行器系统在真实风源下飞行进行实验验证。

动态系统的在线多目标模型独立自适应跟踪机制
摘要:在机器人文献中,最佳跟踪问题通过使用各种鲁棒和自适应控制方法来解决。然而,这些方案与实施限制有关,例如在具有完整或部分基于模型的控制结构的不确定动态环境中的适用性、离散时间环境中的复杂性和完整性以及复杂耦合动态系统中的可扩展性。开发了一种在线自适应学习机制来解决上述限制,并为跟踪控制类问题提供通用的解决方案平台。该方案使用同时线性反馈控制策略最小化跟踪误差并优化整体动态行为。采用基于值迭代过程的强化学习方法来求解底层贝尔曼最优方程。生成的控制策略以交互方式实时更新,而无需任何有关底层系统动态的信息。采用自适应评论家的方法实时逼近最优解值函数和相关控制策略。在仿真中说明了所提出的自适应跟踪机制,以在不确定的气动学习环境下控制柔性翼飞机。

基于快速行进方法和深度强化学习的自主船的新颖道路遵循方法
路径以下是自动船只的必不可少的工具之一,它确保自动船能够充分能够在指定的无碰撞水中导航。这项研究提出了一种新的路径,遵循基于快速行进方法(FM)方法和深入增强学习(DRL)的自主船的方法。所提出的方法能够控制船以遵循不同的路径,并确保路径跟踪误差始终在设定范围内。借助FM方法,基于网格的路径偏差图是专门生成的,以指示网格点和路径之间的最小差异。此外,特定设计的路径偏差感知器是为了模拟基于路径偏差图的设定路径偏差边界的范围传感器。之后,培训了一个基于DRL的圆形路径来控制船舶。尤其是通过模拟对该方法进行验证和评估。获得的结果表明,所提出的方法始终能够维持较高的总体效率,并具有相同的层次,以遵循不同的路径。此外,这种方法的能力对自主船的发展表现出显着的贡献。

在不确定的环境接触和力量中,软机器人的精确控制
摘要 - 重新研究已经报道了生物启发的软机器人的显着性,以表现出灵敏和接触式的友好型。在这项工作中,我们采取了第一个步骤,通过提出一个全面的建模和控制框架来解决细长气动软机器人的问题。我们的框架采用了一个完全参数化的模型,该模型可以准确地描述了使用Hermite插值的机器人配置和分布力。利用此模型,我们进一步建立了一种估计算法,该算法可以推断出有限的运动数据中的完整机器人配置并分布外力,从而使接触位置和力量感知。整合了该模型和估计器,我们的控制框架 - 工作在不同的力下实现了精确的机器人运动控制,平均轨迹跟踪误差在0.3 mm之内。它还检测到并适应不确定的接触,在自动避免障碍物和精确抓握的测试中证明了这一点。此框架对各种应用程序(例如环境探索和安全操纵)有望在需要与环境的互动中进行安全操作。