XiaoMi-AI文件搜索系统
World File Search System轮式
移动机器人技术的计算原理:第二版
这本针对高级本科生和研究生的教科书强调了针对运动,感应和推理的一系列策略的计算和算法。它集中在轮式和腿部移动机器人上,但也讨论了其他各种推进系统。新版本在过去10年中提出了机器人和智能机器的进步,包括对SLAM(同时本地化和映射)和多机器人系统的显着覆盖。它包括其他数学背景和样本问题的广泛列表。现在在第一版中假设的各种数学技术在文本末尾的附录中介绍了,以使本书更加独立。

Bell-AH-1Z.pdf
简介 ................................................................................ 4 背景/历史 .............................................................................. 6 一般特性 .............................................................................. 8 外部尺寸 .............................................................................. 10 设计特点 .............................................................................. 12 机身 ...................................................................................... 12 模块化结构 ...................................................................... 13 起落架 ...................................................................................... 14 标准滑橇起落架 ............................................................. 14 可选轮式起落架 ............................................................. 15 诺斯罗普·格鲁曼综合驾驶舱和航空电子设备 ............................................. 16 AH-1Z 综合驾驶舱 ............................................................. 18 多功能和双功能显示器 ............................................................. 20 飞行控制 ............................................................................. 26 自动飞行控制系统 ............................................................. 26 洛克希德·马丁目标瞄准系统 (TSS) ...................................................... 28 TSS 传感器 ............................................................................. 30 TSS 性能 ............................................................................. 31 泰雷兹头盔瞄准器和显示系统 ............................................................. 32 武器系统 ............................................................................. 34 火箭队......

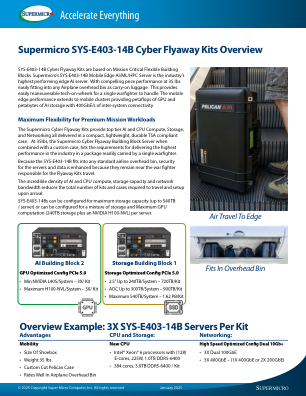
Supermicro SYS-E403-14B Cyber Flyaway 套件概述
SYS-E403-14B Cyber Flyaway 套件基于任务关键型灵活构建模块。Supermicro 的 SYS-E403-14B 移动边缘 AI/ML/HPC 服务器是业界性能最高的边缘 AI 服务器。35 磅的重量具有极具吸引力的性价比,可轻松作为随身行李放入任何飞机行李架。这为单个作战人员提供了易于操作的轮式技术。移动边缘性能扩展到移动集群,提供千万亿次浮点运算的 GPU 和千万亿字节的 AI 存储,以及 400GbE/s 的系统间连接。
GMV 事故导致一名士兵丧生
2023 年 5 月 25 日,当地时间 10 时 26 分,一名被派往科威特布林营的 23 岁专家在一次政府机动车 (GMV) 事故中丧生,地点位于科威特乌代里营。在一次支援靶场行动的行动中,一辆高机动性多用途轮式车辆翻车。一名士兵受重伤,另一名士兵永久性完全残疾。目前尚不清楚事故的具体情况,包括士兵是否使用安全带、事故顺序以及速度是否是造成事故的一个因素。

陆军维护功能用户手册...
摘要。本手册涵盖了管理维护、控制使用和报告陆军装备保修行动和缺陷所需的表格和记录的准备和管理。适用性。本手册适用于现役陆军、陆军国民警卫队、美国。S。陆军预备役和承包商在应急环境中的支援行动。它适用于拥有或支持陆军通信安全 (COMSEC) 设备和船只的非战术(商用)轮式车辆和非陆军活动。它还适用于所有空中交通管制 (ATC) 设备,包括战术和 U。S 。由联邦航空管理局 (FAA) 指定在国家空域系统 (NAS) 中使用的 A T C 和导航设施 (N A V A I D)。适当和例外权限。不适用。临时更改。对此的临时更改

第四代显示器 22-2 软件
• AutoTrac™ 转弯自动化间歇性地不产生端部转弯。• 主动实施指导在 MY20 和更新的 8R 拖拉机上没有响应。• AutoTrac™ 在 MY20 更新的 8R 轮式机器上反向行驶。• 400-600R 系列喷雾器 AutoTrac™ 在更高速度下行驶。• 在主点前面接合时,机器同步车轮运动过度。• 机器同步的 Wi-Fi 条信号电平不一致。• 机器同步踢出需要冷启动重启。• AutoPath™ 清除编辑轨迹页面中的移位会导致线路再生。• 无法加载和转换处方文件到第四代显示器。• 4200 显示器的视频馈送延迟。• 此版本包含重要的软件安全增强功能。

18传感器融合
几乎每个机器人都将依靠多个传感器(包括多种类型的传感器)进行感知和本地化任务。这使机器人可以利用每个传感器的不同强度,以获得更全面的传感能力。例如,自动驾驶汽车可以同时使用激光范围和雷达来测量距离,因为在某些情况下,一种传感器可能比另一个传感器更好。作为另一个例子,轮式机器人可以使用GNSS剂量以及车轮编码器来估计位置。但是,虽然每个传感器都可以向类似目标提供数据(例如估计位置或方向)它们的感应方式可能大不相同。本章介绍了传感器融合1、2的主题,并提供了有关有效1 F. Gustafsson的算法的讨论。统计传感器融合。Studentlitteratur,2013年,第1页。 554
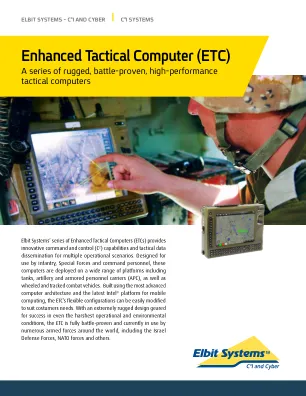
增强型战术计算机 (ETC) - Amazon S3
Elbit Systems 的增强型战术计算机 (ETC) 系列为多种作战场景提供了创新的指挥和控制 (C 2 ) 功能和战术数据传播。这些计算机专为步兵、特种部队和指挥人员使用而设计,部署在各种平台上,包括坦克、火炮和装甲运兵车 (APC),以及轮式和履带式战车。ETC 采用最先进的计算机架构和最新的 Intel ® 移动计算平台构建,其灵活的配置可以轻松修改以满足客户的需求。ETC 具有极其坚固的设计,即使在最恶劣的操作和环境条件下也能取得成功,经过充分的战斗验证,目前已被世界各地的许多武装部队使用,包括以色列国防军、北约部队等。

第 5 章 - 发动机启动系统
大多数航空发动机(无论是往复式还是涡轮式)在启动过程中都需要帮助。因此,这种装置被称为起动器。起动器是一种机电机构,能够产生大量机械能,这些机械能可应用于发动机,使其旋转。往复式发动机只需以相对较慢的速度转动,直到发动机启动并自行转动。往复式发动机点火并启动后,起动器便会脱离,直到下次启动前不再起作用。对于涡轮发动机,起动器必须将发动机转速提高到一定速度,以便有足够的气流通过发动机以点燃燃料。然后,起动器必须继续帮助发动机加速到自持速度。涡轮发动机起动器在发动机启动中起着至关重要的作用。