XiaoMi-AI文件搜索系统
World File Search System轮式


GAO-08-316R 国防后勤
2008 年 1 月 22 日国会委员会主题:国防后勤:陆军需要实施有效的管理和监督计划,以执行科威特设备维护合同国防部 (DOD) 依靠承包商执行部署地点部队所需的许多功能。例如,在科威特的阿里夫詹营,陆军使用承包商为伊拉克和阿富汗的行动提供后勤支持。阿里夫詹营的承包商翻新和修理各种军用车辆,如布雷德利战车、装甲运兵车和高机动性多用途轮式车辆 (HMMWV)。然而,虽然承包商为部署的部队提供了宝贵的支持,但我们经常报告说,长期存在的国防部合同管理和监督问题增加了浪费的机会,并使国防部更难以确保承包商以合理的价格高效、有效的方式满足合同要求。在其 2007 财年报告中,
飞机制造中的人形机器人——HAL lirmm
摘要 — 我们报告了一项合作项目的结果,该项目研究了在飞机制造中部署人形机器人解决方案,用于轮式或轨道式机器人平台无法进入的一些装配操作。多接触规划和控制、双足行走、嵌入式 SLAM、全身多感官任务空间优化控制以及接触检测和安全方面的最新发展表明,考虑到这种大规模制造场所的特定要求,人形机器人可能是自动化的可行解决方案。主要挑战是将这些科学和技术进步集成到两个现有的人形平台中:位置控制的 HRP-4 和扭矩控制的 TORO。在空客圣纳泽尔工厂的 1:1 比例的 A350 机身前部模型内的支架组装操作中展示了这种集成工作。我们介绍并讨论了该项目取得的主要成果,并为未来的工作提供了建议。
力量投射:
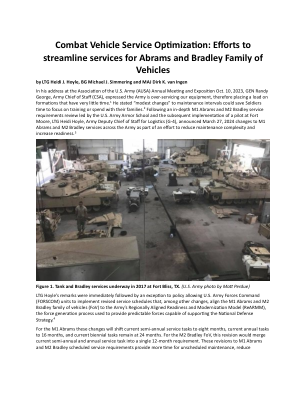
2022 年 2 月,陆军制定了计划,将在未来 10 到 15 年内将大部分非战术和战术车辆过渡为混合动力车辆,到 2050 年过渡为专门为野战而制造的全电动汽车。1 这一过渡将从非战术车辆 (NTV) 开始,即用于军事设施和非作战运输的卡车、轿车、公共汽车、货车和其他车辆。这方面的大部分要求可以通过采用现有或即将上市的商用车辆来满足。陆军战术轮式车辆 (TWV) 车队的过渡提出了更为复杂的挑战,这些车辆包括用于运送部队、装备、水、弹药和迄今为止的燃料的超轻型、轻型、中型和重型车辆,还可以进行侦察并提高部队的机动性。尽管如此,人们越来越意识到,商业电气化技术的发展正在取得进展,军队的电气化目标“相当容易实现”,甚至可能加速。2
附录 A2 - 运输和连接政策委员会 - ...
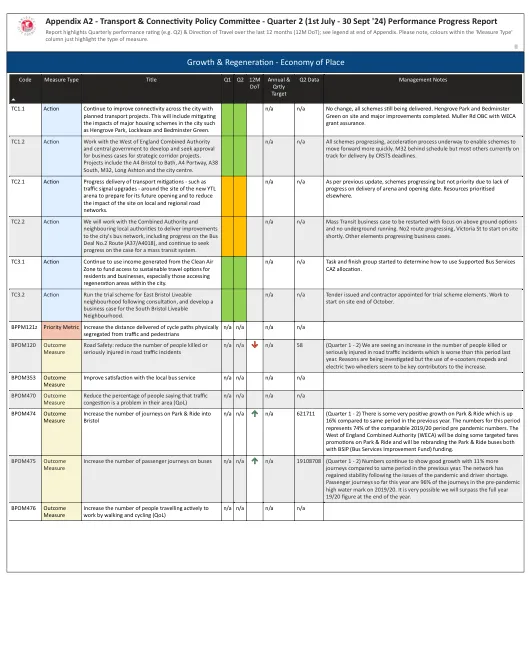
n/an/a 每年都会进行资本改善工程,以确保通行权网络满足其用户的需求。工程可能包括更换门栅以提高可达性标准,铺设坚硬的石材或沥青等粘合材料,使道路可供轮式用户通行,以及改善标志以强调道路的存在。除了资本资金外,还尽可能寻求第 106 条资金,以改善开发地点周围通行权网络的可达性,这可能会增加当地人口并鼓励步行出行。每年还会进行维护工程,以确保整个夏季生长季节道路上没有植被。道路有时会因故意行为而被阻塞,因此一旦我们注意到这种阻塞,就会采取执法行动。新的通行权要求也会在公路管理局注意到后进行调查,这可能会进一步增加对公众的开放。
残疾人包容性家具的历史观点
残疾家具设计不是现代概念。有证据表明,家具早在公元前5世纪就以轮式床的形式适应残疾。随着时间的流逝,这些发展成轮椅和马车。其他稍后设计的家具,例如专门设计的凳子,为痛风患者和填充的软垫椅子提供舒适性,以改善舒适性,随着时间的流逝而发展。在1940年代和1950年代,开发了新技术以形成具有复杂曲率的胶合板,以适应人体,这使家具公司积极主动设计残疾人包含家具。今天,我们熟悉自适应家具,例如校长桌,电子立管躺椅,折叠式淋浴座椅和橱柜和抽屉的盲文标签手柄。包括残疾人家具的未来将利用现代技术(例如机器人技术)来满足各种个人的需求。创新(例如3D打印和人工智能)目前在设计的许多方面都在趋势,而家具设计也没有什么不同。

使用进化机器人方法生成多足机器人群的集体行为
摘要 本文演示了如何基于进化机器人方法生成多足机器人群的集体行为。群体机器人领域的大多数研究都是使用轮式驱动的移动机器人进行的。本文重点研究如何使用多足机器人群生成集体行为。进化机器人方法用于设计机器人控制器。将基于直觉的约束因素纳入适应度函数,使机器人的步态与自然生物相似。使用 PyBullet 物理引擎在计算机模拟中进行了排队任务实验。机器人控制器由具有单个隐藏层的循环神经网络表示。实验结果表明,提出的约束因素成功地设计了与自然生物相似的机器人步态。结果还表明,进化机器人方法成功地设计了多足机器人群集体行为的机器人控制器。
陆地巡检机器人关键技术及其在水产养殖中的应用前景
陆地巡检机器人在执行各种任务时,需要感知周围 环境、定位自身位置、识别目标对象等,这些功能的实 现都依赖于传感器为机器人提供与外部环境交互的 “ 感 知器官 ” 。传感器是陆地巡检机器人的重要组成部分, 能够感知周围环境并获取相关信息,帮助机器人感进行 自主导航、避障、监测、抓取等工作。曹现刚等 [ 13 ] 设计 一种固定柔性轨道式悬挂巡检机器人平台,以解决煤矿 井下特种巡检机器人在三维环境重建和非结构环境运动 轨迹规划等关键技术,利用轨道,降低轨道铺设,为煤 矿环境巡检提供新的特种巡检平台。张书亮等 [ 14 ] 研究了 室内移动机器人的定位问题,提出融合轮式里程计、惯 性测量单元 IMU(inertial measurement unit) 、超宽带 UWB(ultra wide band) 和激光雷达定位数据的方法,依次 对不同传感器的定位数据进行融合,提高室内移动机器 人的定位精度。梁莉娟等 [ 15 ] 建立场景环境坐标系,利用 传感器探测出障碍物信息,对探测到的障碍物进行定位, 制定激光近场探测传感器的动态避障行为。李琳等 [ 16 ] 提 出基于条纹式激光传感器的机器人焊缝跟踪系统,采用 机器人末端安装条纹激光传感器,通过小波变换模极大 值理论分析焊缝轮廓,确定焊缝特征点。王正家等 [ 17 ] 提 出一种基于多传感器的机器人夹取系统,融合机器人内 置传感器所测量的位置、速度和角度等信息,利用外置 传感器完成对目标物的自动识别与定位。 2.1.1 传感器的使用场景及应用分类
努力为艾布拉姆斯和布拉德利家族简化服务......
从 2023 年 6 月开始,陆军召集了一批高级准尉,任务是确定陆军如何“减轻士兵负担并实现真正的战备状态”。5 该小组的工作成果是陆军部总部 (HQDA) 执行命令 (EXORD) 335-23,除其他事项外,这是指导制定深思熟虑的流程的重要一步,该流程有条不紊地用基于使用的标准取代基于时间的标准。此前,陆军通过发布非战斗行动维护计划 (NCOMP) 开始了这项工作。这些计划旨在更好地将维护要求与非战斗行动期间的实际使用情况而不是基于时间的服务间隔保持一致,旨在最终取代 AR 750-1 中描述的低使用率计划。 6 然而,这些项目主要集中于陆军的轮式车队,利用额外的行政要求要求部队将车辆纳入计划,并没有为装甲部队的战斗车辆维修提供替代方案。

用于飞机制造的人形机器人——Irisa
摘要 — 我们报告了一项合作项目的结果,该项目研究了在飞机制造中部署人形机器人解决方案,用于轮式或轨道式机器人平台无法进入的一些装配操作。多接触规划和控制、双足行走、嵌入式 SLAM、全身多感官任务空间优化控制以及接触检测和安全方面的最新发展表明,考虑到这种大规模制造现场的特定要求,人形机器人可能是自动化的可行解决方案。主要挑战是将这些科学和技术进步集成到两个现有的人形平台中:位置控制的 HRP-4 和扭矩控制的 TORO。在空客圣纳泽尔工厂的 1:1 比例的 A350 机身前部模型内的支架组装操作中展示了这种集成工作。我们介绍并讨论了该项目取得的主要成果,并为未来的工作提供了建议。