XiaoMi-AI文件搜索系统
World File Search System轮式

少数民族服务机构(MSI)计划
边境保护对前线的人固有危险。为了帮助确保被控保护美国边界的人的安全,得克萨斯大学里奥格兰德山谷大学的科学领导奖(SLA)研究团队开发了一个轮式地面机器人和飞行无人机系统,能够共同搜索,巡逻和发现威胁。这些尖端的车辆是自主的,并结合了机器学习和计算机视觉的最新进展,以最大程度地提高其适应性,从而使他们能够智能地面临挑战,而无需人类操作员不得不不断监督和干预。除了成为前线比赛的改变游戏规则外,该项目还进行了高级研究,从而导致了五个出版物和会议演讲,四次学生毕业,并帮助里奥格兰德山谷(Rio Grande Valley)的学生在安全和国防领域获得了工作。
基于地形力学的动态模型...
摘要 - 基于Terramogealics的轨道车辆(TRV)的动态模型被广泛用于动态分析中。但是,由于其高复杂性和计算成本,这些模型与基于模型的控制器设计不相容。本研究提出了一种新型且简化的基于TRAMEGRAINIC的动态模型,可用于基于优化的实时运动控制器设计。到此为止,我们使用轨道剪切应力的平均项近似轨道的相互作用,以使模型在计算上有效且可线化。通过在轮式车辆场中引入滑动比和滑动角的概念,最终将基于Terramogearics的动态模型简化为紧凑而实用的单轨动态模型,从而降低了对精确滑移比的需求。单轨模型使我们能够通过分别考虑侧面和纵向动力学来设计有效的运动控制方案。最后,在各种道路条件下使用实际TRV对提出的动态模型进行了验证和验证。此外,在模拟中比较了不同模型的性能,以证明所提出的模型在TRV路径遵循任务中的表现优于现有模型。

机器人运动技能的加固学习中的动作空间设计
增强学习(RL)是合成机器人运动技能的强大工具。但是,实践者必须仔细选择学习的动作空间,这一决定通常以直觉为指导。例如,轮式机器人可能与车轮速度动作空间,具有关节位置的腿部机器人以及带有笛卡尔空间目标的操纵器相关联。对于一些精心研究的任务,该领域已在共同的动作空间上汇聚。例如,位置控制动作空间被广泛用于学习腿部运动[1,2,3]。但是,为了启动机器人的运动,这些位置命令必须通过反馈定律转换为扭矩,以执行模拟和控制真实的机器人。这提出了几个问题:位置控制的哪些属性使其对于腿部运动任务特别有用,而不是直接学习使用扭矩行动?位置控制对所有类型的机器人任务有用,还是其他能力更有效的动力空间对具有不同动态的系统更有效?其他未经研究的任务将如何从不同的动作空间设计选择中受益?

步兵(CMF 11)职业发展计划第 1 章 职责
第 1 章 职责步兵是一个独特的兵种,旨在通过火力和机动接近敌人,消灭或俘虏敌人,并通过火力、近战和反击击退敌人的进攻。步兵是陆军中唯一为完成这一任务而组织、装备和训练的兵种。步兵领导人同步所有战斗力要素以击败敌人。步兵士官确保在其监督下的士兵接受 MOS 和基本士兵技能的单独训练。步兵士官还训练士兵在战场上作战、取胜和生存。士官准备在战场上训练、领导和使用步兵和其他作战武器,参与各种军事行动。步兵通过降落伞或空袭、机械化或轮式车辆或步行抵达战场。插入方式取决于任务、敌人、地形、天气和可用时间。 CMF 11 由三个独立且不同的军事职业专业 (MOS) 组成,MOS 11B 步兵、MOS 11C 间接火力步兵和 MOS 11Z 步兵高级中士。
ISO-WESTERN-ENERGY-ENERGY-ENERGY-MAREAKET-BENEFITS-REPORT- ...ISO-WESTERN-ENERGY-ENERGY-ENERGY-MAREAKET-BENEFITS-REPORT- ...
在本月和季度中,所有轮毂转移都概括了。目前,通过通过促进车轮的直接经济利益来促进车轮的一个WEIM实体;只有水槽和源直接受益。作为WEIM合并计划利益相关者流程的一部分,ISO致力于通过卷来监视轮子,以评估在添加新的WEIM实体之后,是否有潜在的未来需要寻求市场解决方案来解决公平的乘车福利共享。ISO将在季度报告中继续跟踪WEIM市场中轮毂传输的数量。该体积反映了每个WEIM BAA的总轮式转移,而不论其潜在路径如何。本节中估计的净进出口净进出口反映了净进出口的整体数量;相反,表2中提供的进出口反映了两个WEIM BAA之间的总转移。该度量的每个月和相应的日历季度以MWH为单位的能量,如表3至6所示,图3至6。
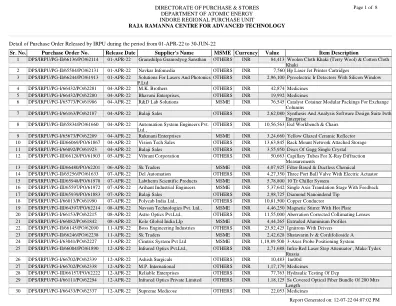
采购订单编号 发布日期 供应商名称 价值...
腔体镜 793 Nm 光纤耦合激光二极管的供应和保修 25 Kvar、440 伏、备用电容器单元的供应 双极输出电源模块 2 英寸安装零级石英晶体四分之一波长 Pl 铝壳线绕电阻器 半电动液压堆垛机 5m 有机玻璃板 氯化聚氯乙烯 (Cpvc) 管道和配件 单晶基板 为手套箱端口供应氯丁橡胶折叠手套 残余气体分析仪的供应、安装和调试 70 瓦单端金属卤化物 (Mh) 灯作为 Pe 1 英寸 C 平面 (0001) 蓝宝石晶片 仪器冷却风扇两千万卢比,10 平方。毫米铜导体,1100V 级,XLPE 子连接器冷阴极真空计头 Metravi 高度叶片风速计,品牌:Metravi Tristar 钢棘轮式扭矩扳手,范围 5-35 Nm
无人机系统:全球评论
空中发射 - 载人飞机 - 气球 Zephyr QinetiQ - 履带式翼伞 Exdrone BAI Aerosystems - UAV (Predator) Finder NRL 蹦极绳(手动张紧) DragonEye AeroVironment 罐式发射(手持) - Black Widow AeroVironment - MATE Dutch Space 汽车/卡车发射 - Aerosonde Aerosonde - Snow Goose MMIST 集装箱发射 - 气动 Neptune DRS Technologies - RATO KZO Rheinmetall DE 手动发射 - Aladin EMT - Carolo Mavionics - 追踪器 EADS D&SS 发射器 - 蹦极 LUNA EMT - 液压 Phoenix BAE Systems - 气动 Sperwer Sagem - 大气 Vulture Mk II ATE RATO(火箭辅助起飞) Pioneer Pioneer UAV Inc 武器发射 正在开发中鱼雷管发射 正在开发中 轮式起飞 - 捕食者 通用原子公司 AS - 全球鹰 诺斯罗普·格鲁曼公司 VTOL RMax 雅马哈发动机公司

采用新时代电动汽车的核心部件……
巴西是全球十大汽车生产国之一,也是南美洲最大的能源消耗国(Sousa & Castañeda-Ayarza,2022 年)。2020 年,货运和客运消耗了该国 31.2% 的能源(巴西,2020 年)。该领域的任何变化都会对经济和环境产生重大影响(Carvalho 等人,2020 年)。电动汽车 (EM) 解决了电池供电的电动汽车 (EV) 的所有轮式运输问题,包括技术、基础设施、立法和经济模型(Jaworski,2018 年)。此外,它可以减少可再生电力发电排放的温室气体 (GHG)。2015 年,巴西向《联合国气候变化框架公约》缔约方大会 (COP21) 提交了其国家自主贡献意向。该目标为整个经济设定了绝对减排目标,巴西的温室气体排放量在 2025 年和 2030 年分别限制在 1.3 GtCO2e 和 1.2 GtCO2e,与 2005 年(2.1 GtCO2e)相比分别减少 37% 和 43%(Grottera 等人,2022 年)。

报告日期:2022 年 4 月 12 日 081-000-1015 加载伤亡...
条件:您处于作战环境中。您负责将担架和可移动伤员装载到以下地面医疗后送车辆之一上:高机动性多用途轮式车辆 (HMMWV) M997 系列、M113A3 履带式救护车、M1133 Stryker 医疗后送车、M1266A1 长轴距 (LWB) 防地雷伏击车 (MRAP) 或装甲多用途医疗后送车。您可以使用其中一辆地面医疗后送车辆、担架和担架带。您将需要至少一名其他士兵的协助来协助装载担架患者。所有其他先前的医疗干预均已完成。此任务的一些迭代应在 MOPP 4 中执行。此任务应在 IED 威胁条件下进行训练。标准:按照 (IAW) ATP 4-02.2、ATP 4-02.4、ATP 4-25.13 和当地 SOP 将伤员按照正确的顺序装载到地面救护车上,以便进入疏散平台,准确率 100%,不会对伤员造成进一步伤害,同时遵守所有警告和注意事项,准确无误,使用任务 GO/NO-GO 检查表。

替代地面机器人穿越沙地和岩石地外地形的必要性和可行性
尽管这些火星车在月球和火星探索方面有着令人瞩目的记录,但它们的任务也暴露了轮式移动系统所面临的重大局限性,这阻碍了科学探索。例如,勇气号火星探测器在一个名为“特洛伊”的地方陷入一块松散的土壤中,最终因电量不足而终止任务。该地点的土壤以硫酸铁为主,内聚力很低,因此机械性能较弱,延伸至与车轮半径相当的深度。 [12] 不幸的是,这层沉积物隐藏在一层硬化程度较弱的土壤外壳之下,导致危险直到火星车嵌入土壤中才被发现。 [9] 在任务初期,勇气号的六个车轮中有一个出现故障,需要修改驾驶策略,这加大了救援难度。 [12] 机遇号探测器在穿越子午线平原随处可见的大型风成波纹时也遇到了类似的挑战。特别是,它被困在“炼狱”波纹的松散沙子中很长时间 [13](图 1 A)。