机构名称:
¥ 1.0
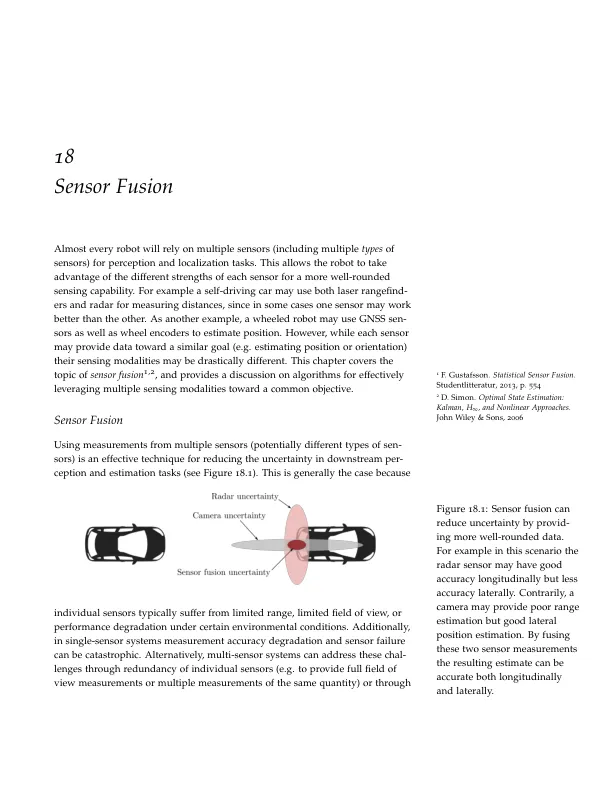
几乎每个机器人都将依靠多个传感器(包括多种类型的传感器)进行感知和本地化任务。这使机器人可以利用每个传感器的不同强度,以获得更全面的传感能力。例如,自动驾驶汽车可以同时使用激光范围和雷达来测量距离,因为在某些情况下,一种传感器可能比另一个传感器更好。作为另一个例子,轮式机器人可以使用GNSS剂量以及车轮编码器来估计位置。但是,虽然每个传感器都可以向类似目标提供数据(例如估计位置或方向)它们的感应方式可能大不相同。本章介绍了传感器融合1、2的主题,并提供了有关有效1 F. Gustafsson的算法的讨论。统计传感器融合。Studentlitteratur,2013年,第1页。 554
18传感器融合
主要关键词



相关文件推荐