机构名称:
¥ 1.0
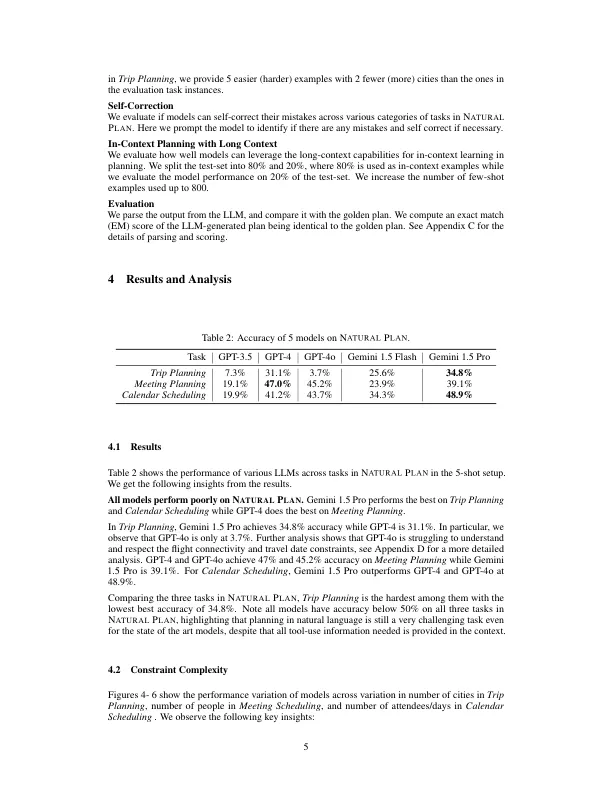
我们引入了 N ATURAL P LAN ,这是一个自然语言中的现实规划基准,包含 3 个关键任务:旅行规划、会议规划和日历安排。我们将评估重点放在 LLM 的规划能力上,并提供关于任务的完整信息,方法是将 Google 航班、Google 地图和 Google 日历等工具的输出作为模型的上下文。这样就无需使用工具使用环境来评估规划上的 LLM。我们观察到 N ATURAL P LAN 是针对最先进模型的具有挑战性的基准。例如,在旅行规划中,GPT-4 和 Gemini 1.5 Pro 分别只能实现 31.1% 和 34.8% 的解决率。我们发现,随着问题复杂性的增加,模型性能急剧下降:当有 10 个城市时,所有模型的性能都低于 5%,这凸显了 SoTA LLM 在自然语言规划方面存在巨大差距。我们还对 N ATURAL P LAN 进行了广泛的消融研究,以进一步阐明自我校正、少量泛化和具有长上下文的上下文规划等方法对改进 LLM 规划的 (不) 有效性。
对自然语言规划的 llms 进行基准测试
主要关键词


相关文件推荐