机构名称:
¥ 1.0
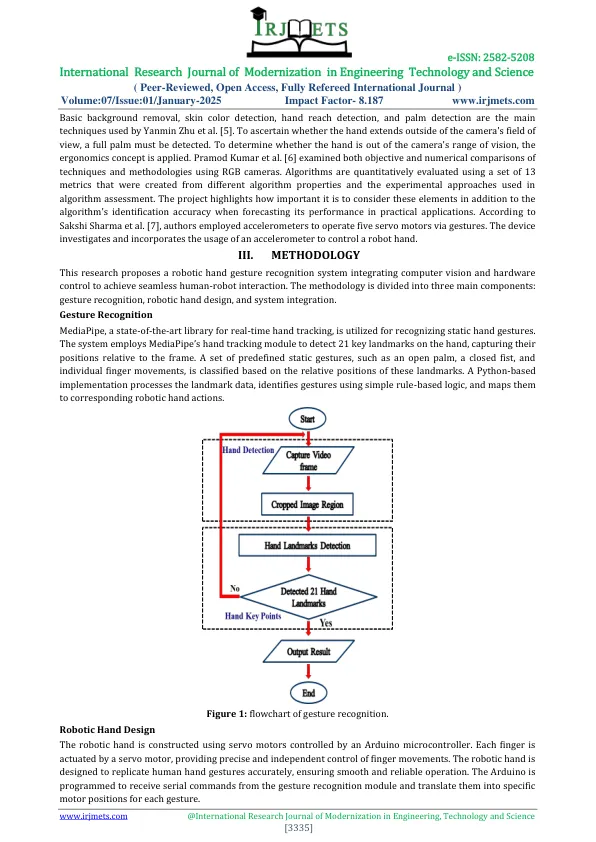
在我们现代时代,机器人技术是一个总是在变化的领域。机器人是一种机械机器,可以在人类的指导和控制下进行手动劳动。已经开发了许多机器人,以进行人们无法直接完成的危险活动。本研究提出了一种用于使用计算机视觉的人类机器人相互作用的机器人手势系统。MediaPipe用于通过实时的手动跟踪和具有里程碑意义的检测来识别静态手势。公认的手势被转化为控制信号,并发送到配备伺服电机的Arduino控制机器人手。结果证明了该系统在辅助机器人技术,远程操作和教育中的应用潜力,未来的工作着重于动态手势和增强实时性能。
AI对学生生活的影响
主要关键词



相关文件推荐