机构名称:
¥ 1.0
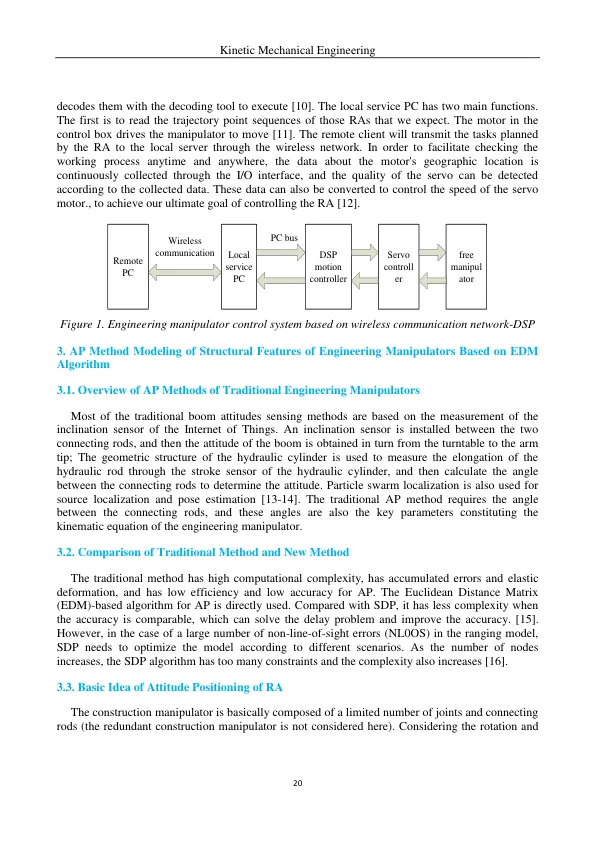
摘要:在施工机械制造领域,机器人臂(RA)的开发非常迅速且广泛使用。许多智能工程RA可以改善工业生产过程,并在物联网传感器的作用下提高生产效率。本文基于无线通信网络和事物技术的组合构建了工程操纵器控制系统,该系统用于控制机械手的操作,调整机械手的握紧姿势,并在工业生产过程中推动操纵器的旋转和操作。但是,传统的态度感应方法效率低下。因此,本文基于欧几里得距离矩阵(EDM)算法构建了工程操纵器的态度传感方法的模型。机器人臂态度感知(AP)的准确性更高。
对工程态度感知的建模分析...
主要关键词


相关文件推荐