
机构名称:
¥ 2.0
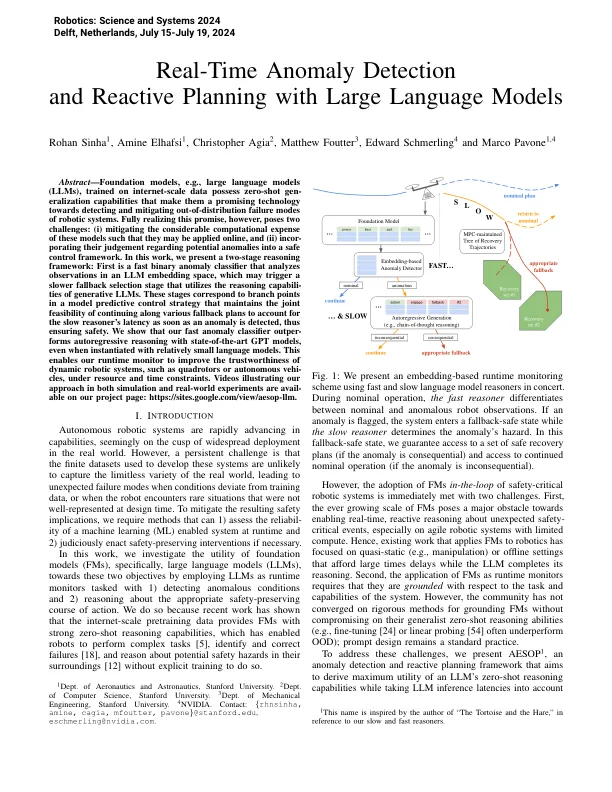
摘要 - 在Internet规模数据上接受培训的大型语言模型(LLMS)具有零拍摄的一代化功能,这使它们成为一种有前途的技术,用于检测和缓解机器人系统的分布故障模式。完全意识到这一诺言提出了两个挑战:(i)减轻这些模型的大量计算费用,以便可以在线应用它们,以及(ii)将他们对潜在异常现象的判断局限于安全控制框架。在这项工作中,我们提出了一个两阶段的推理框架:首先是一个快速的二进制异常分类器,可以分析LLM嵌入空间中的观察结果,该观察结果可能会触发较慢的后备选择阶段,该阶段利用了生成LLMS的推理。这些阶段对应于模型预测控制策略中的分支点,该策略保持了沿着各种后备计划继续沿着各种后备计划的联合可行性,以便在检测到异常后立即考虑缓慢的潜伏期,从而确保安全性。我们表明,即使使用相对较小的语言模型实例化,我们的快速异常分类器与最先进的GPT模型形成了自回归推理。这使我们的运行时监视器能够在资源和时间限制下改善动态机器人系统的可信度,例如四摩托或自动驾驶汽车。在我们的项目页面上可以使用仿真和现实世界实验中说明我们方法的视频:https://sites.google.com/view/aesop-llm。
使用大语言模型的实时异常检测和反应性计划
主要关键词



相关文件推荐





























