机构名称:
¥ 2.0
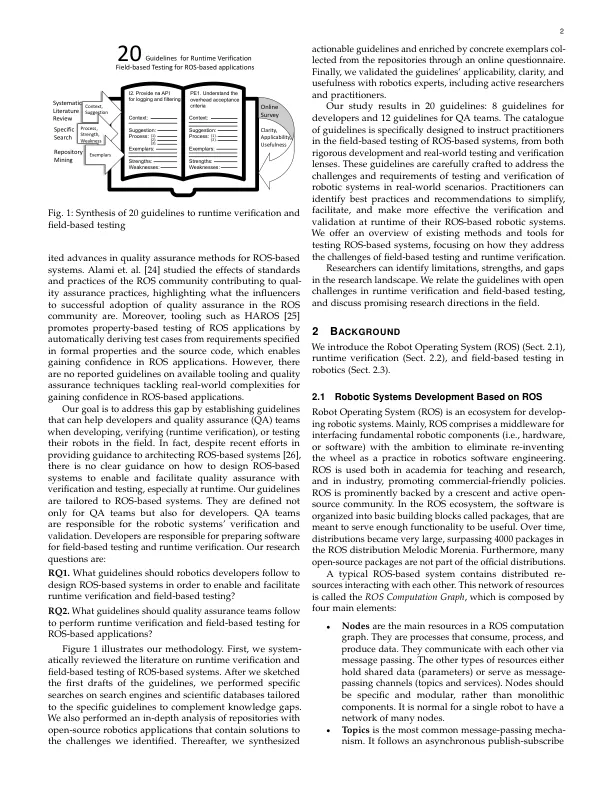
摘要 - 在越来越多的领域(例如制造,医疗保健和太空探索)中,动物系统变得普遍存在。为此,工程软件已成为建立可维护和可重复使用的机器人系统的关键学科。机器人软件工程研究领域已受到越来越多的关注,促进了自主权作为基本目标。但是,鉴于模拟无法实现现实模仿现实世界现象的解决方案,机器人技术开发人员仍然受到挑战,试图实现这一目标。机器人还需要在不可预测且无法控制的环境中操作,这需要在软件中实现的安全且值得信赖的自适应功能。应对挑战的典型技术是运行时验证,基于现场的测试和缓解技术,可实现故障安全解决方案。但是,基于建筑师ROS的系统没有明确的指导来启用和促进运行时验证和基于现场的测试。本文旨在通过提供可以帮助开发人员和质量保证(QA)团队在开发,验证或测试其机器人的机器人时提供指南来填补这一空白。这些准则经过精心量身定制,以应对现实情况下测试机器人系统系统的挑战和要求。我们进行了(i)关于针对机器人系统的运行时验证和基于现场测试的研究的文献综述,(ii)基于ROS的应用程序存储库,(iii)通过两个问卷验证了55个答案,验证了两个问卷的适用性,清晰度和有用性。我们为开发人员提供20个指南:为8个指南,为12个指南贡献了为机器人软件工程领域的研究人员和从业人员制定的QA团队。最后,我们将指南绘制为迄今为止在运行时验证和基于现场的基于ROS的系统的测试方面的挑战,并概述了该领域有希望的研究方向。指南网站和复制软件包:https://ros-rvft.github.io
ROS- ...
主要关键词


相关文件推荐