机构名称:
¥ 1.0
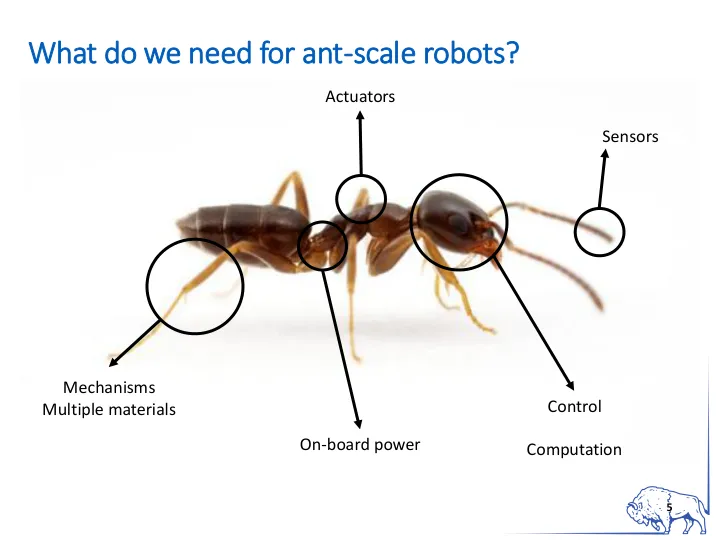
我们的研究重点是设计机制和致动的机制,控制和自治的计算集成以及应用工程工具来了解昆虫生物力学。我们利用新的理解和知识来将微型机器人带到与昆虫对应物相同的自主权水平。
机器人形式和功能实验
主要关键词


相关文件推荐