机构名称:
¥ 1.0
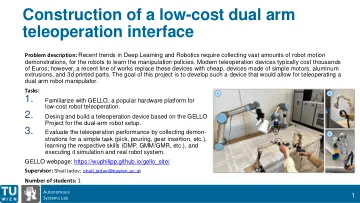
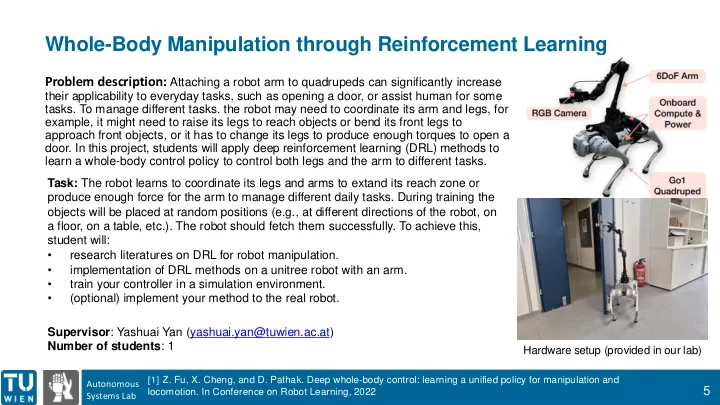
问题描述:在此项目中,学生将采用深度强化学习(DRL)来发展机器人的操纵技巧,重点关注诸如接地操作和连接器插入等任务,这对于组装过程至关重要。选择特定的增强学习算法的灵活性允许探索各种DRL方法,例如基于价值的方法(例如DQN),基于策略的方法(例如PPO)或参与者 - 繁体架构。主要目标是设计一种控制策略,该策略使机器人能够通过与环境的互动来自主学习这些技能,从而通过反复试验和错误来提高其性能。
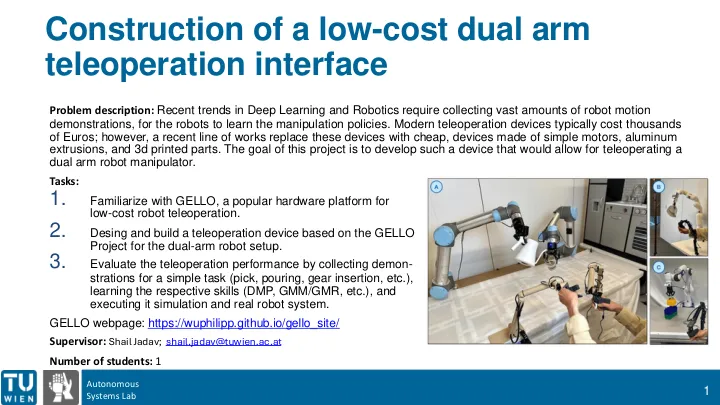
低成本双臂近距离界面的构建
主要关键词

相关文件推荐