机构名称:
¥ 3.0
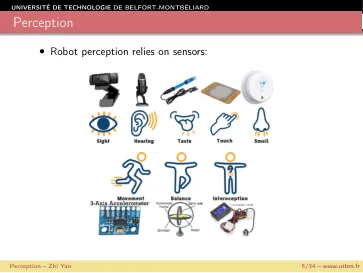
•从定义上讲,传感器是为感测物理现象而产生输出信号的设备。•通过使用传感器,机器人可以感知环境,不仅涵盖其外观,例如到物体的距离,还可以覆盖其自己的组件(即内部),例如电动机速度。•从使用的角度来看,机器人使用的传感器可以分为两类:本体感受和外部感受传感器。•当前的现成传感器可以根据其作用形式(类似于电气组件)将被动类型分为被动类型。
感知-RO51-移动机器人概论
主要关键词


相关文件推荐